|
一、毕业设计主要内容、研究意义及预期目标
1.研究意义
2017年1月,国家工信部发布了《物联网”十三五“规划》,重点指出:物联网将进入万物互联发展新阶段,生产生活和社会管理方式进一步向智能化、精细化、网络化方向转变,经济社会发展更加智能、高效。随着互联网的崛起,促进了电商的快速发展,物流行业的发展十分迅速。

图1 2010-2020年中国快递行业业务量统计及增长情况
随着快递量的迅速增加,传统的物流搬运已不能满足市场的需求[1]。
在传统物流搬运车间中采用的是人工搬运,搬运效率低下,同时分拣效率低、出错率高,并不能满足目前批量大、品类多的物流分拣车间[2]。此外,我国人口老龄化程度增加,且年轻人并不青睐物流搬运、分拣这种劳作相对单调、辛苦的工作,使得劳动力成本不断增加因此。因此迫切需要使用一种方法来代替人工搬运。
2016年12月,智能制造大会在南京正式开启,国家工信部在此期间公布了《中国智能制造十三五规划》,提出将打造智能化/数字化车间,把传统的工厂向智能化设备工厂转型。由此可见,打造现代化物、智能化流的搬运分拣车间已经成为搬运分拣车间未来的发展方向之一。
而AGV作为物流装备中智能化程度和柔性化程度相对较高的产品,越来越多地被应用于汽车制造、烟草、电力、电子、医药等领域[1]。特别是《中国制造2025》等强国战略的出台,使得AGV在自动化生产及智能仓储物流中的使用需求呈现爆发式增长:截至2017年,我国物流机器人领域融资金额达13 亿元,2018年中国AGV小车市场规模达到42.5 亿元,AGV小车相关产品市场新增量较2017年实现42.5%的增长[1]。因此,随着物流行业的转型升级,在物流仓库中大量使用物流搬运AGV代替人工劳作是一个必然的发展趋势。

图2 2011-2018年中国移动机器人(AGV)市场新增量及增长情况
AGV输送存在施工简单,路径灵活,不占用空间,移动性较好,柔性等优点。随工业技术的发展,AGV广泛应用于柔性制造系统,大大地提高了物流效率[3]。AGV导航是实现AGV物流搬运的关键技术,AGV导航技术的发展与否也直接影响到了AGV物流搬运的可靠性。目前,AGV主要的导航方式有磁导航、惯性导航、视觉导航、GPS导航、激光导航、光学导航等多种导航技术。
目前GPS导航不适用于室内导航[4],视觉导航目前技术并不成熟[5],惯性导航不适合作为一种单独的导航技术使用且随着运用时间增加,会出现累计误差[6],激光导航需要布置地标,在货架间通道使用困难[8],而光学导航和磁导航虽然技术成熟但系统布置和扩展较为困难。
基于此,本文提出一种基于磁导航和nfc读取定位的节点式的导航技术,并进行研究和验证。
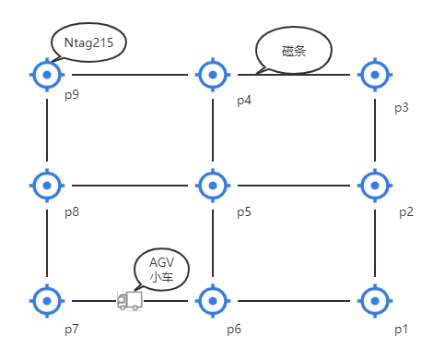
图3 导航地图示意图
使用此导航技术主要是为解决磁导航系统布置和扩展较为困难的问题。节点式的设计能够更好的更改地图,并且能够通过DIJKSTRA算法选取较短的路径以增加AGV小车的搬运效率。
2. 研究的主要内容
(1)如何把地图上传到服务器。
(2)AGV小车如何获取从当前地址到目标地址的最短路径。
(3)AGV小车如何根据获取到的最短路径前往目标地址。
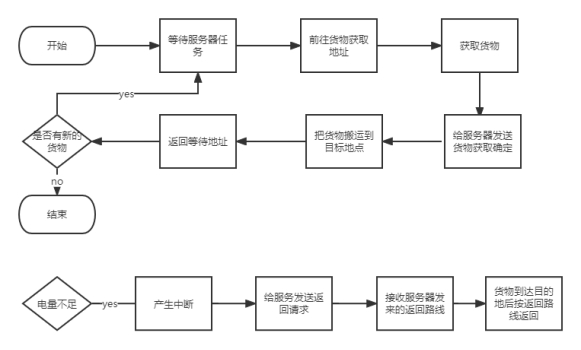
(4)当AGV小车遇到突发情况(如电量不足等)的处理方案。
(5)当地图发生变化时,应该怎样更新服务器的地图。
3. 预期目标
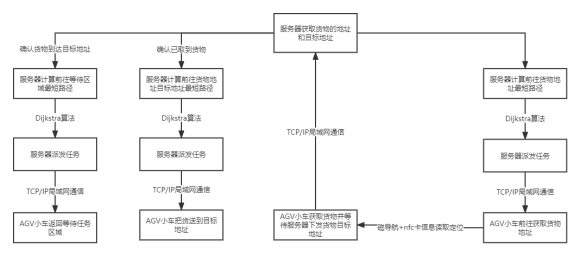
(1)AGV小车能够获取服务器派发下来的任务。
(2)AGV小车能够根据派发的任务获取货物并送到目标地址。
(3)服务器能够计算出此次任务的较短路径。
(4)AGV小车通过读取nfc卡信息确定自己的位置。
(5)AGV小车能够实现避障功能,并在这之后重新获取绕过障碍到目标地址的最短路径。
|