题 目 基于卫星无源探测的空间飞行器主动段
轨道估计与误差分析

摘 要:
本文主要研究了卫星无源探测空间飞行器主动段的轨道估计及误差分析问题, 根据 4 个问题的不同要求,建立了相应的数学模型并求解,实现了卫星轨道估计、飞行器轨道估计、系统误差估计以及联合轨道估计和误差分析等。主要工作包括:
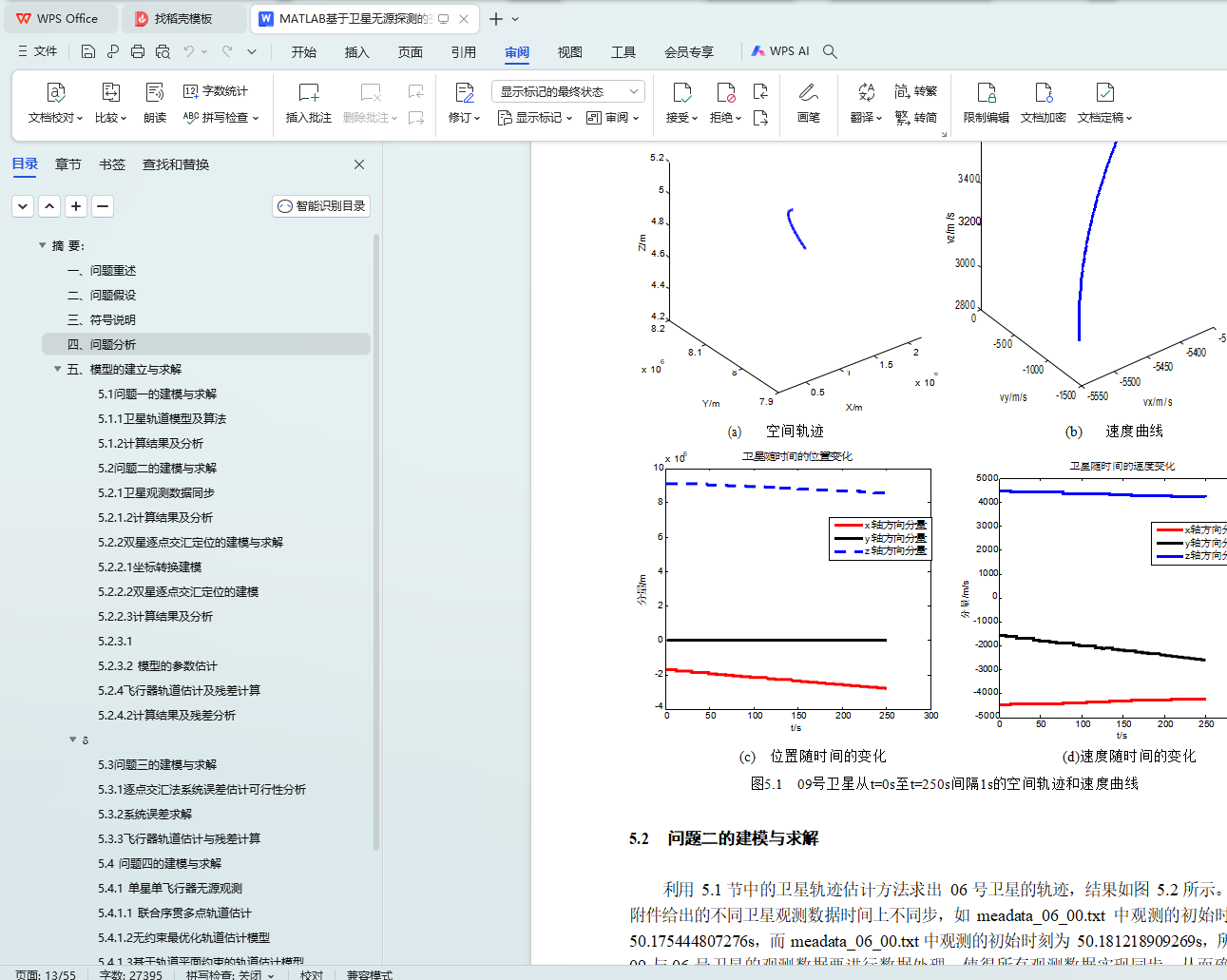
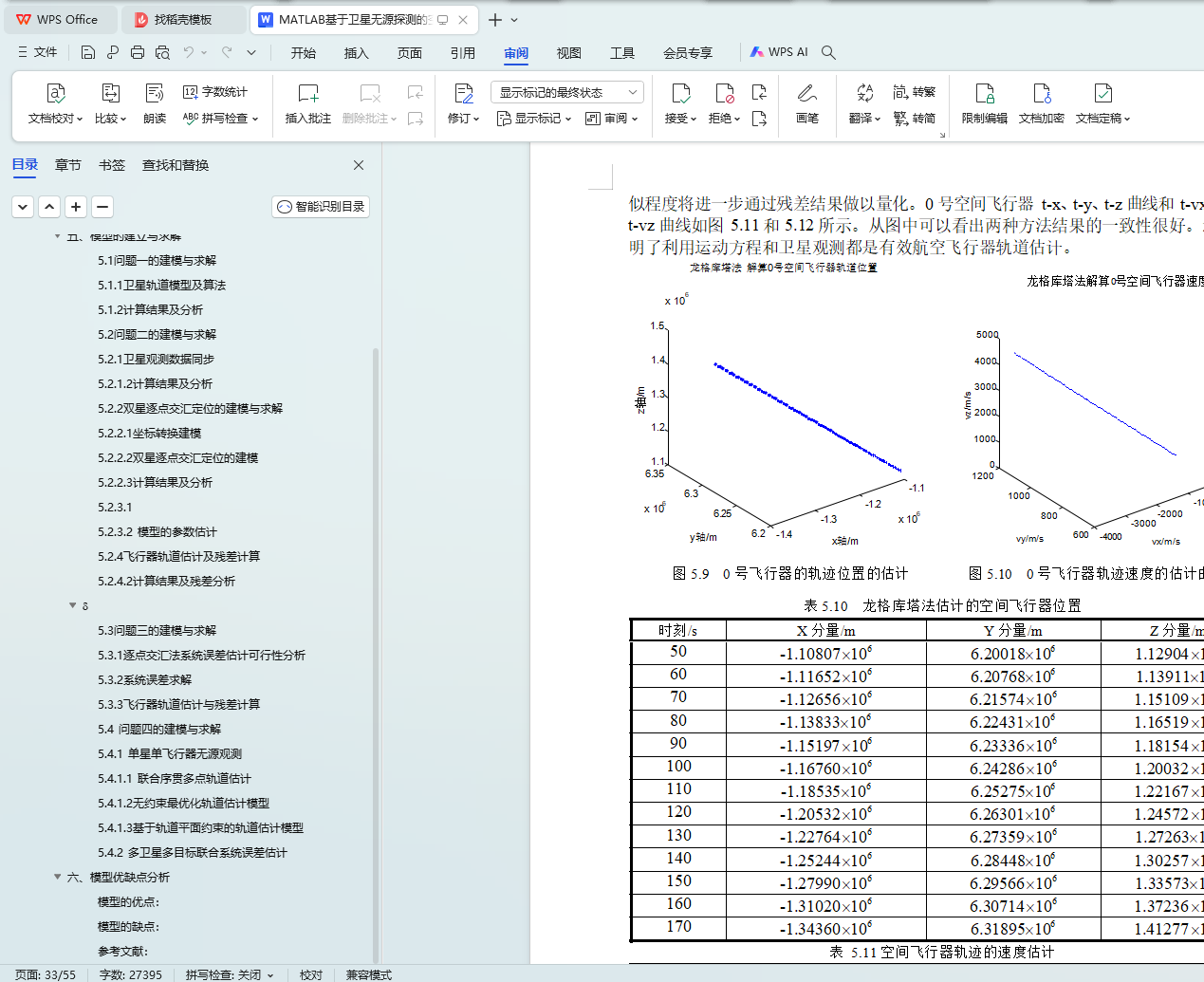
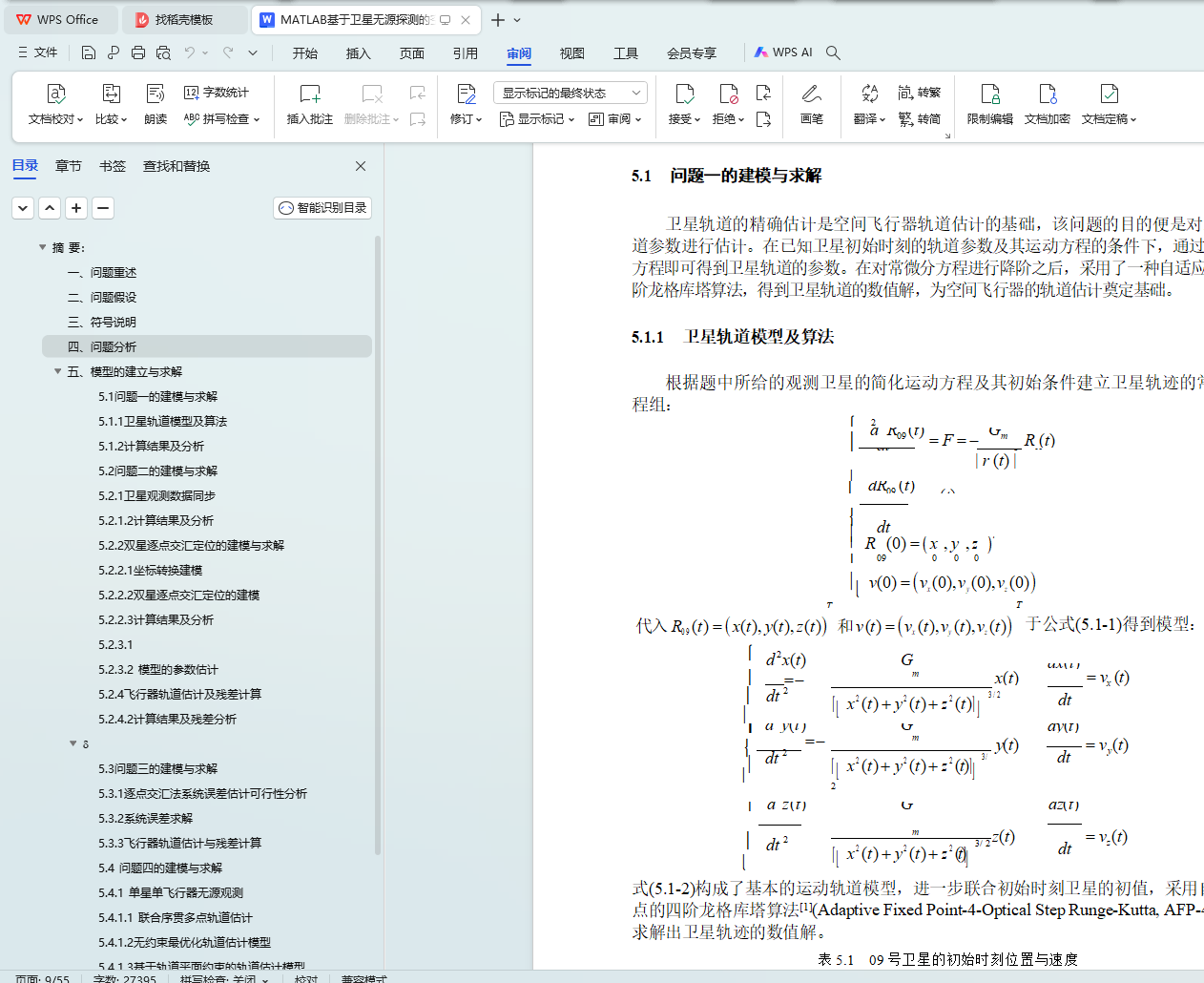
(I)问题 1:对描述观测卫星轨道的简化运动方程这个二阶微分方程进行了降阶,继而提出了一种自适应定点的四阶龙格库塔算法求解运动微分方程,估计了 09 号卫星轨迹,该星在 50s、100s、150s、200s、250s 时刻的位置分别为(1.77381´106 , 8.16138´106 , 4.51669 ´106 )、( 1.50163´106 , 8.12676 ´106 , 4.68468´106 )、
( 1.22770 ´106 , 8.08270 ´106 , 4.84722´106 )、( 9.52349 ´105 , 8.02925´106 ,
5.00413´106 )、( 6.75894 ´105 , 7.96650 ´106 , 5.15524 ´106 )。
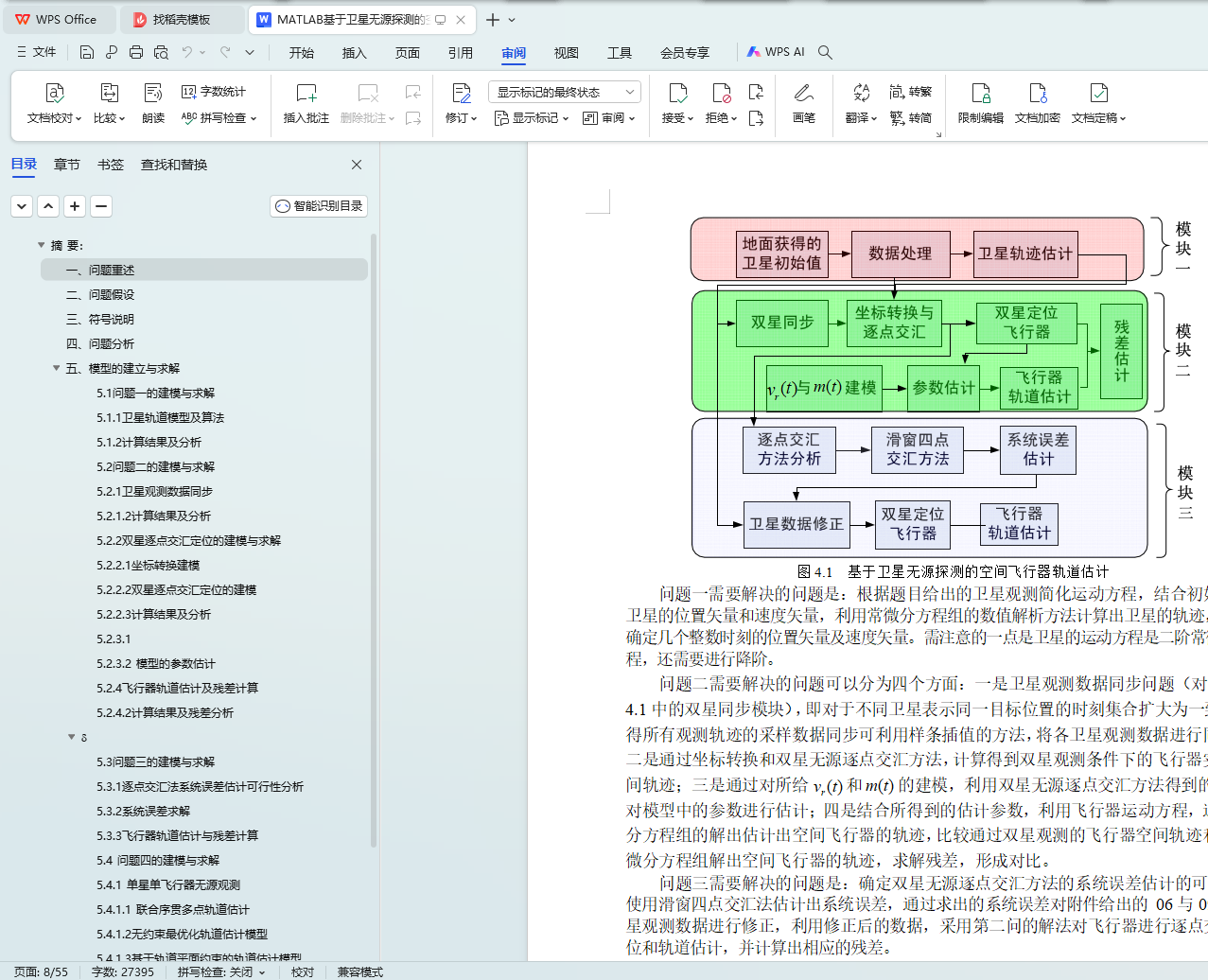
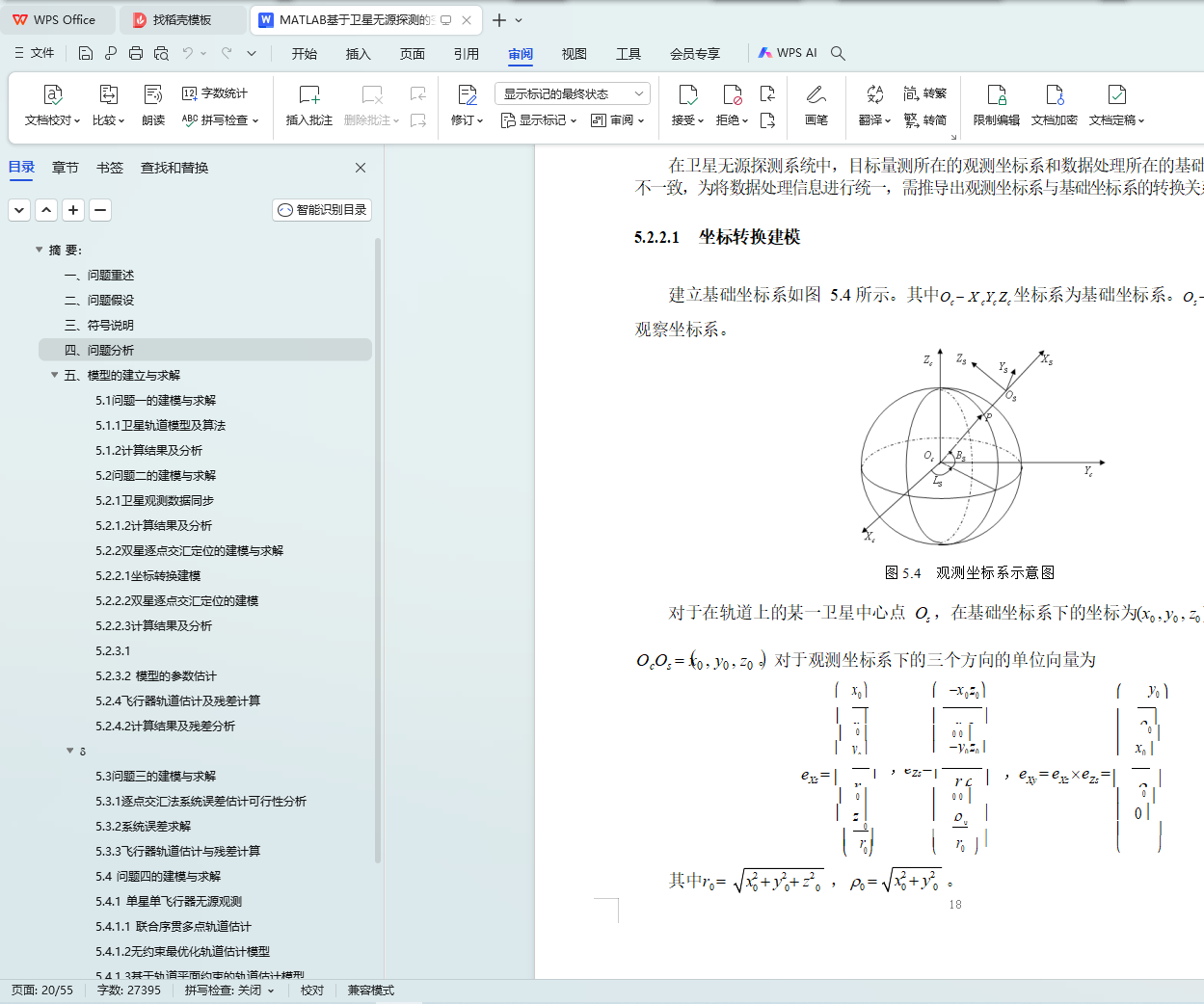
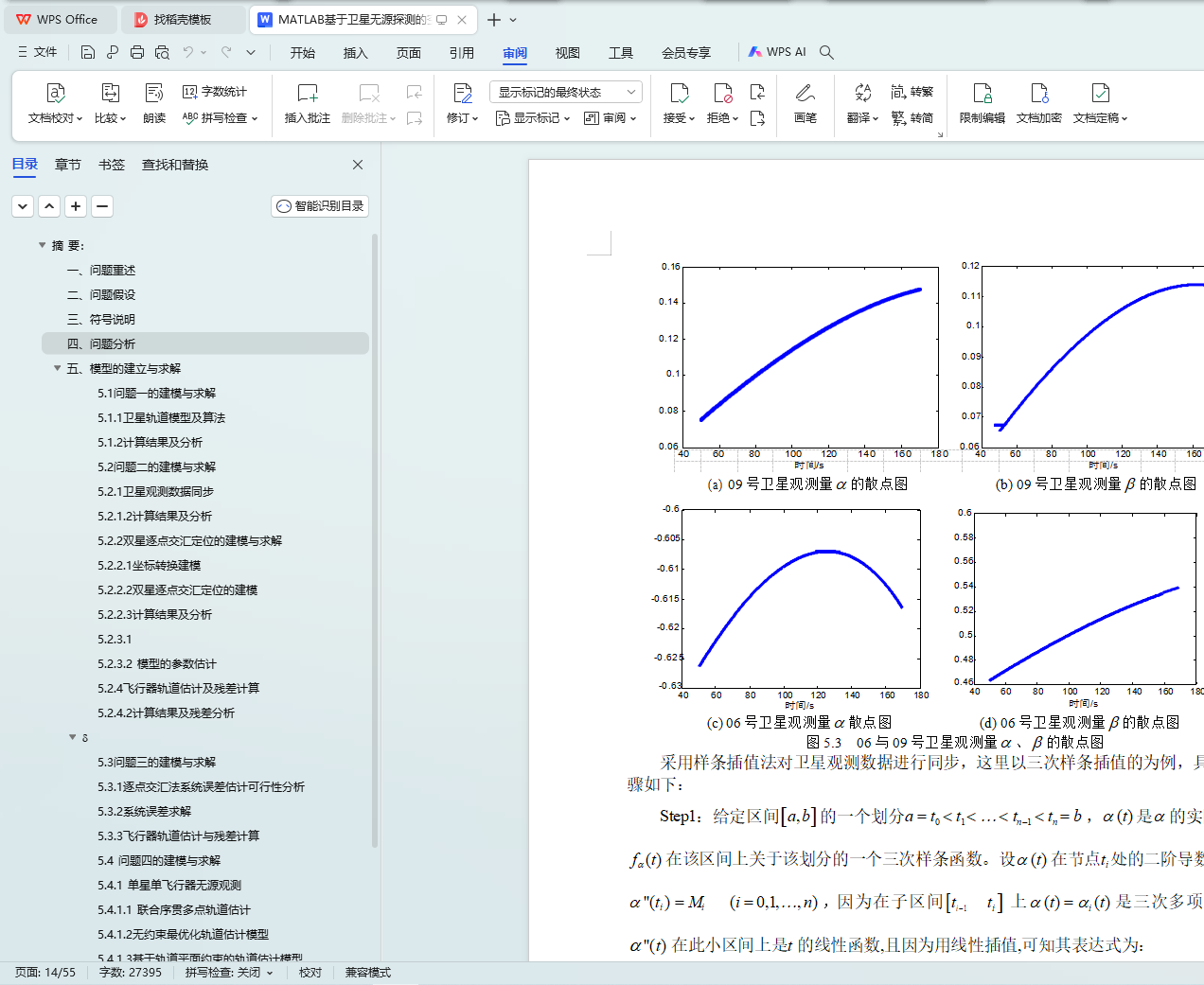
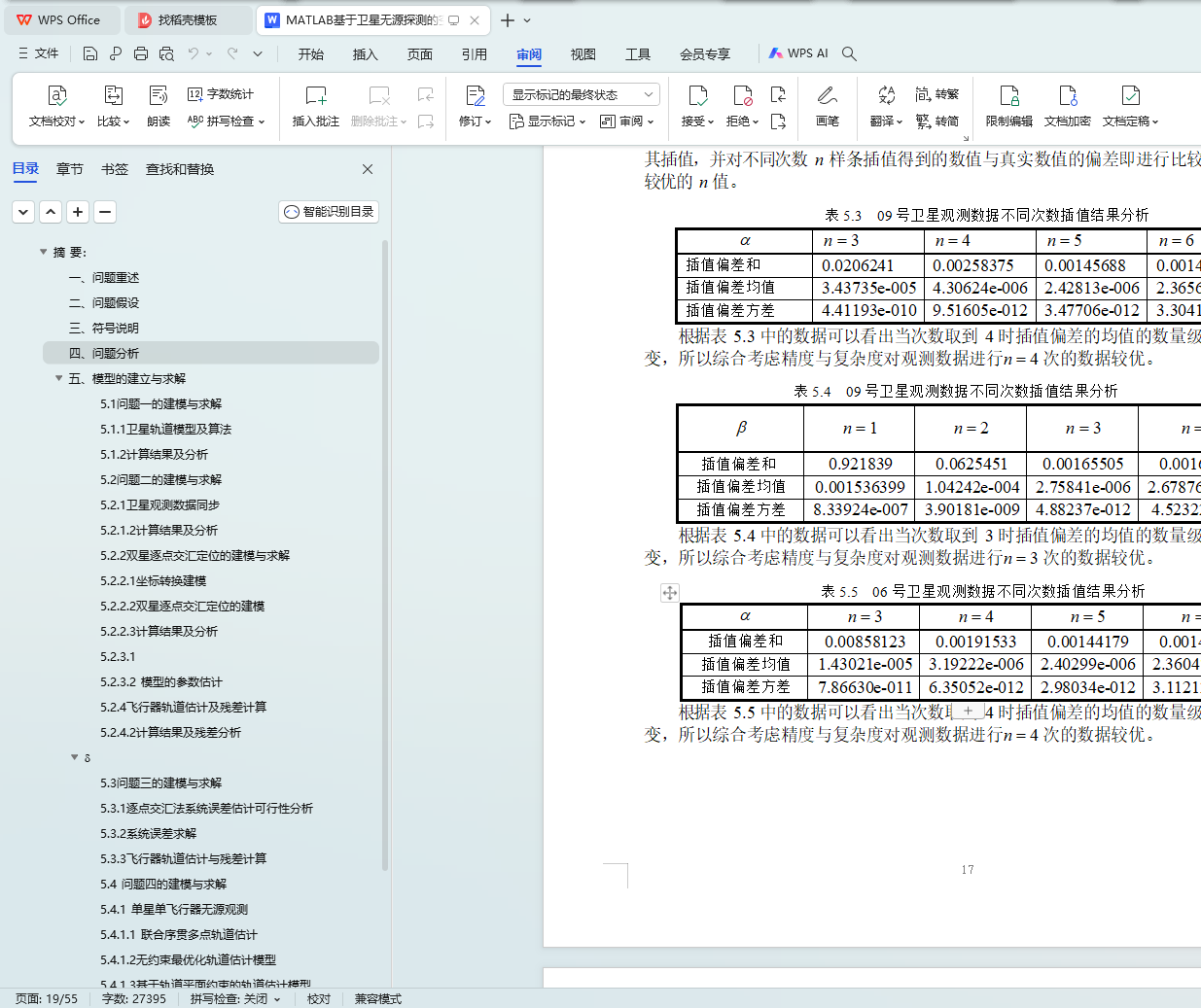
(II)问题 2:针对卫星观测的数据时间异步问题,提出了一种基于样条插值拟合的数据同步算法。因卫星对飞行器的量测所在的观测坐标系与数据处理所在的基础坐标系不一致,推导了观测坐标系与基础坐标系的转换关系,将数据信息统一到基础坐标系下。根据空间飞行器在卫星观测坐标系下的约束关系,建立了双星无源
逐点交汇定位的算法模型,并利用同步后的数据解算出双星观测条件下的飞行器空
间轨迹,继而基于中心差分理论得到飞行器各时刻的速度、加速度。根据vr (t) 和m(t)
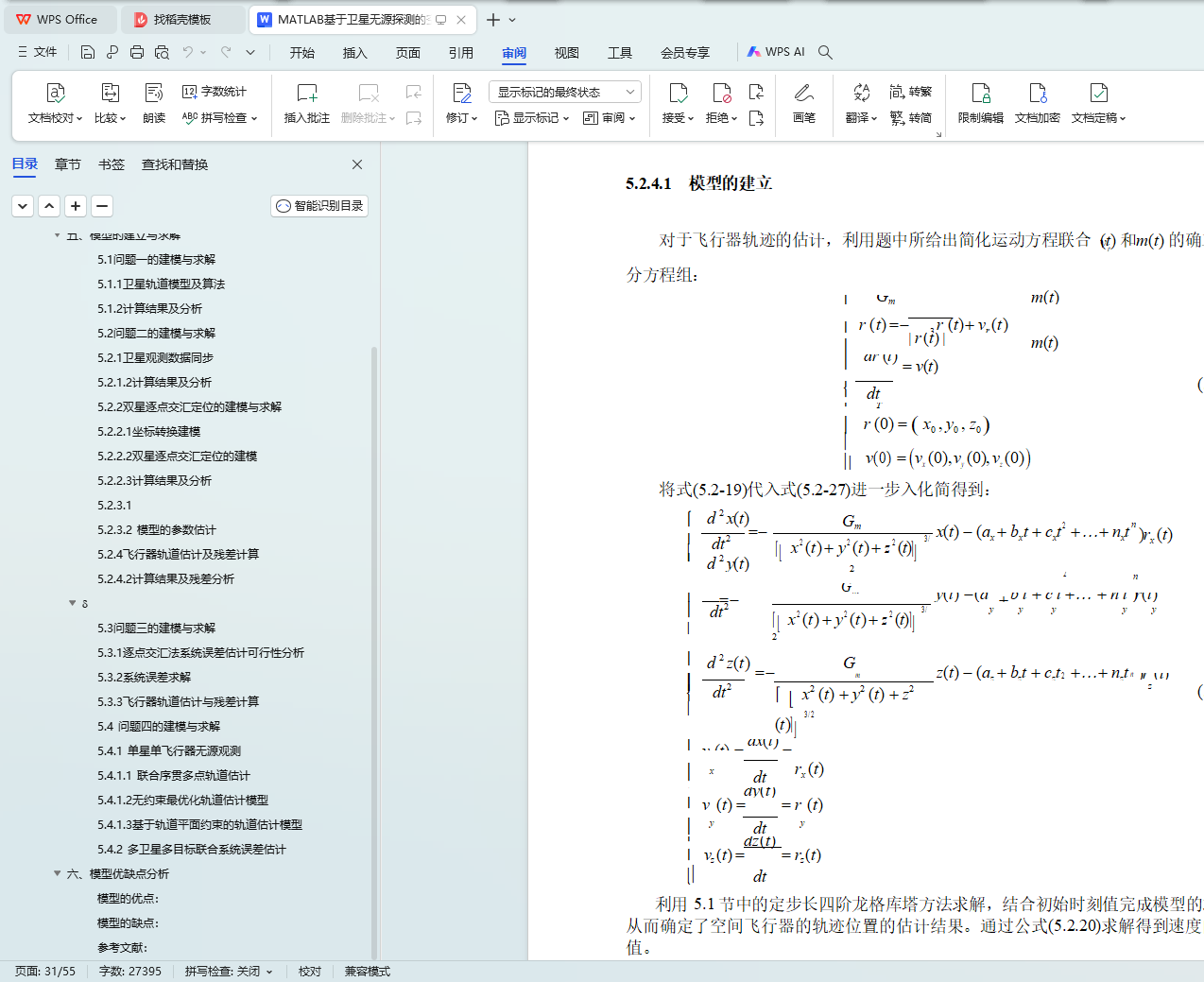
的物理意义和变化规律,对二者分别建立了含有未知参量的近似模型,完善了主动段空间飞行器的运动方程,直接将飞行器的轨迹、速度和加速度数据代入运动方程
可实现模型中未知参数的估计,为简化参数估计,提出了一种基于级数理论的多项

式模型来拟合vr (t)m(t) / m(t) 这一整体,给出了对多项式各阶次系数的估计方法,并
对不同阶次多项式模型的性能进行了分析对比。空间飞行器的运动数据同(I)用四
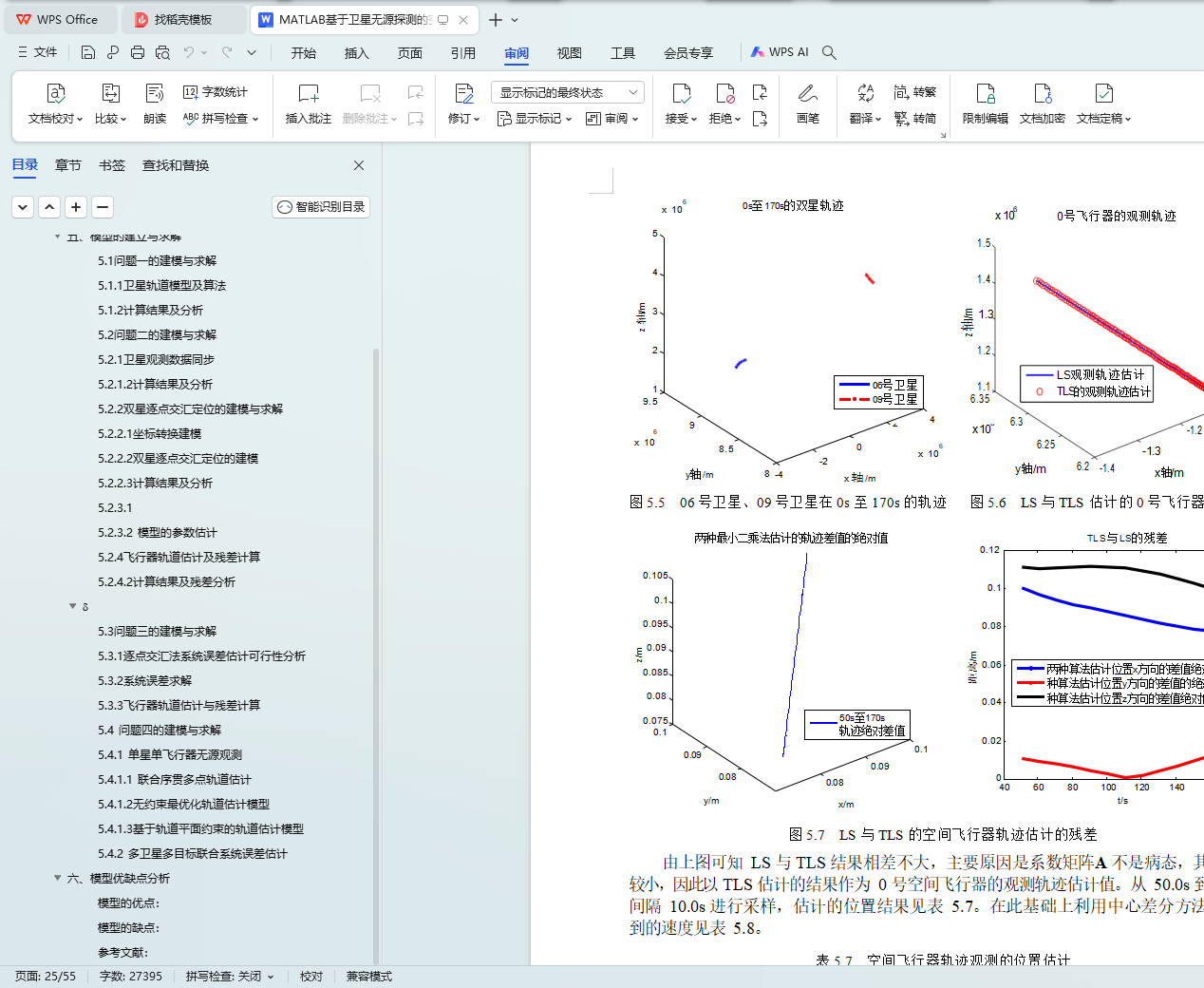
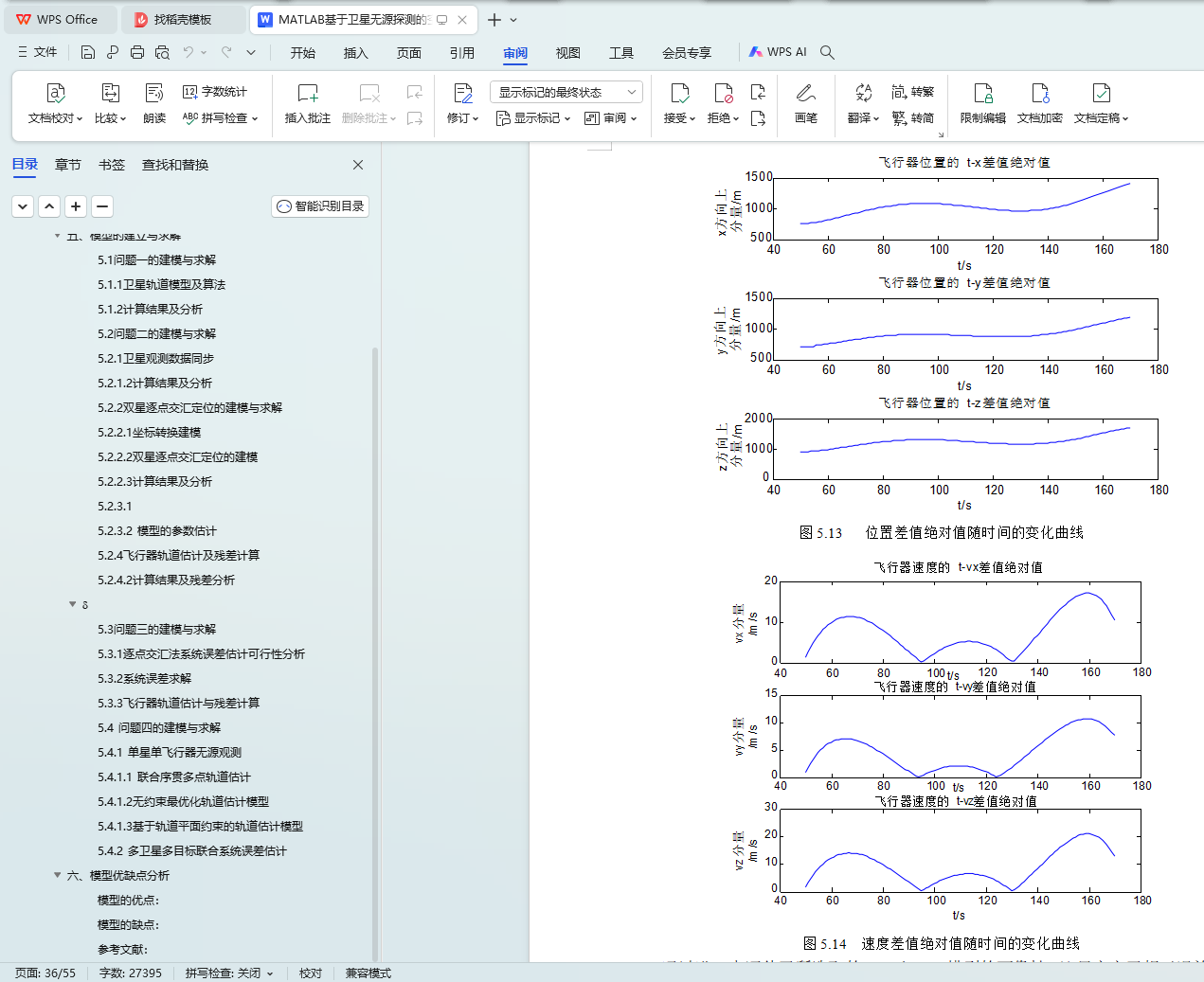
阶龙格库塔法解算运动方程得出。基于上述模型解算出了 0 号飞行器在各个采样点的位置和速度,各位置分量的残差分别为:1.60681´102 、1.19288´102 、1.97124 ´102 ,各速度分量的残差分别为: 6.78000 、4.03933 、8.33612 。
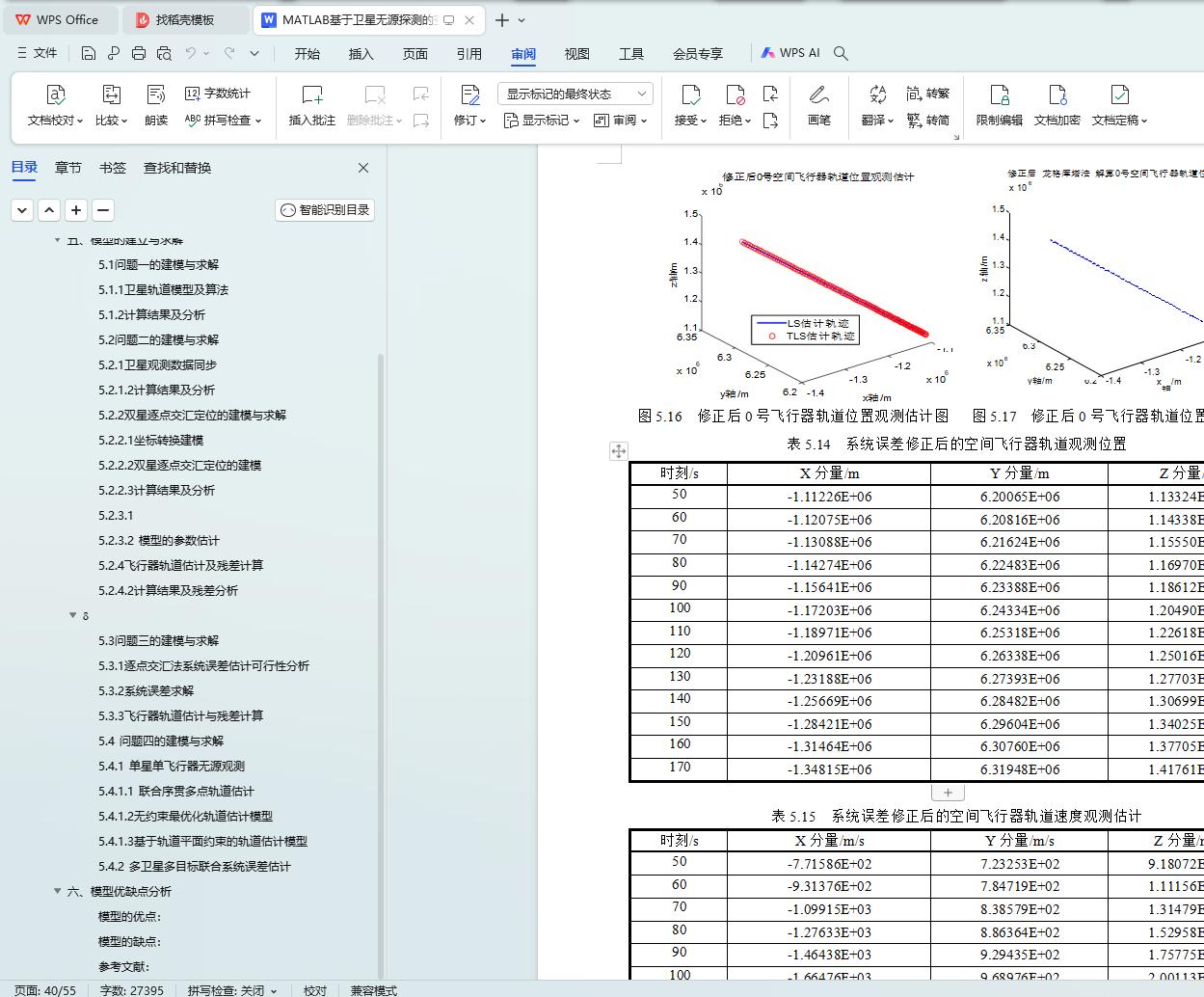
(III)问题 3:根据坐标转换模型和观测坐标系下的量测方程,确定系统误差、
飞行器空间位置和卫星量测数据的关系,建立方程组,通过对方程组未知量个数与自由度关系的分析,发现不能利用逐点交汇方法估计系统误差;进而提出了一种系统误差估计的滑窗四点交汇方法,该方法通过相邻四点的滑动,实现了系统误差动

 态估计。估计出的系统误差为 da = 1.35166 ´10-3 , db = 1.30491´10-3 ,
态估计。估计出的系统误差为 da = 1.35166 ´10-3 , db = 1.30491´10-3 ,
 d = 8.96365´10-4 ,d = 8.38309´10-4 ,db = 5.15881´10-4 ,d = 1.17204 ´10-3 。
d = 8.96365´10-4 ,d = 8.38309´10-4 ,db = 5.15881´10-4 ,d = 1.17204 ´10-3 。
通过求解的系统误差对附件的观测数据进行修正,利用修正后的数据,采用(II) 的方法对飞行器进行轨道估计和误差分析。
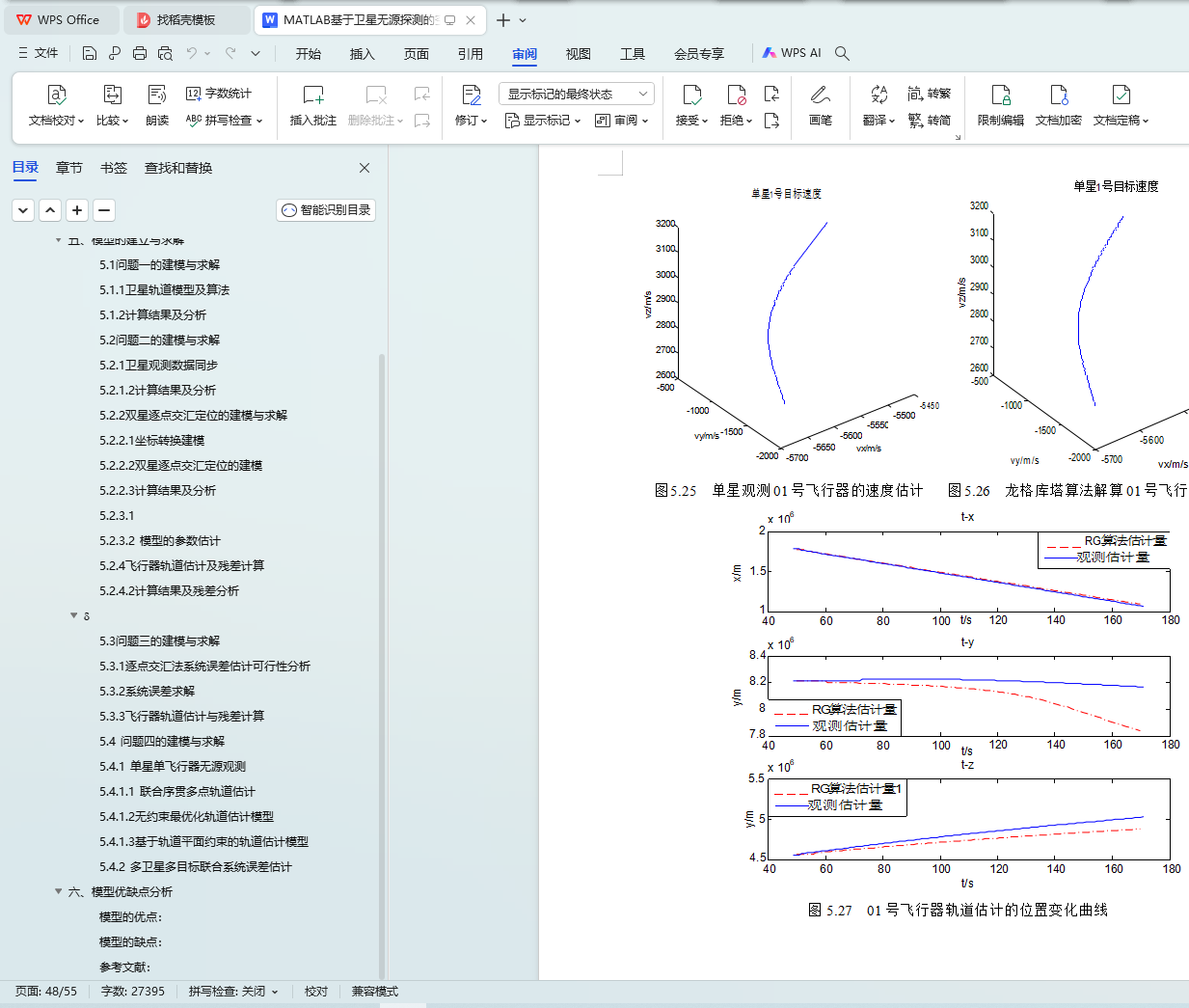
(IV)问题 4:针对单星单飞行器无源轨道估计问题,结合短时间内飞行器的
运动特征,建立了联合序贯多点轨道估计模型、无约束最优化轨道估计模型和基于轨道平面约束的轨道估计模型。利用(III)求得的系统误差对卫星观测数据进行修正,继而基于联合序贯多点轨道估计模型解算出飞行器的轨道参数,实现了单卫星对 1 号飞行器的轨道估计和误差分析。根据坐标转换模型、观测坐标系下的量测方程,通过讨论关于轨道参数和系统误差值的方程组是否可解来确定多星多飞行器联合轨道与误差估计的可行性。通过比较方程组自由度和待估计的轨道参数和系统误差的个数,得出了可估计系统误差的条件:在观测卫星个数 M 与空间飞行器数目 P 满足2MP ³ 3P + 2M 时,系统误差可估计。
关键词:轨道估计,系统误差,四阶龙格库塔算法,滑窗四点交汇,基于级数理论的多项式模型,联合序贯多点