һ����ҵ�����Ҫ���ݡ��о����弰Ԥ��Ŀ��
1.1 �����
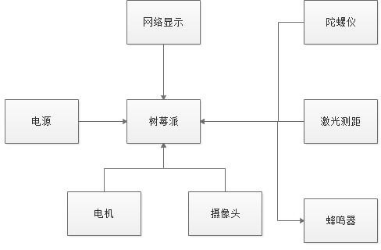
�����ʹ�� solidworks ��ģ���������Ĵ����̵���άģ�ͣ���ʹ�û��ӹ��� 3D ��ӡ�ȼӹ������������Ĵ�ģ�͡����ͨ����ݮ�ɵ�Ƭ��Ϊ���أ����Ƶ������ģ�顢������ģ�顢������ģ�顢����ͷģ��ȹ̶���װ���Ĵ������ϣ���Ƴ�һ�������ݮ�ɵ��Ĵ�ʽ�����ˡ�������ڼ��� SLAM �Ӿ����й�ͬ������ʵ��������λ��·���滮��Ŀ��ʶ��ȹ��ܡ�
��Ҫ�о����ݣ�
��1���Ĵ�ģ�����
��2��SLAM �㷨��ʵ��
����Can ���ߵ��ͨѶ
1.2 �����
����˹�Ѳ�칤������Ѳ��Ч�ʵ͡�����������������ȫ����������ʱ����������й©���¶ȡ������ȹ�����Ϣ�������һ�����ܾ���Ѳ������ˣ���������ģ��p��������GPS ��λģ�顢����ģ�������ģ�飬�ܹ�ʵ�� 24 h �Ծ���ʵ���������¶ȡ��к�����ļ�⣬ͨ�����ߴ���ϵͳ�����ݷ���������ϵͳʵ���;����ϵ�ʵʱ�������û�����ϵͳ�����˹������� ������˹�Ѳ��Ч�ʵ͡�������������Ѳ������⡣
1.3 o Ԥ��Ŀ���������άģ����ơ�������ƺͼ�����Ӿ��ļ�ʱ��λ���ͼ������ʵ���Ĵ�����������װ�������ʹ����ݮ����������������������Ƽ�����Ӿ���ʱ��λ���ͼ������
��������õļ���·�ߡ��о�����������
2.1 ����·��
2.2 �����
�����о����������Ĵ�ʽ��������ƺ� SLAM �㷨������ף������� SLAM �㷨��ɱ��������Ϣ�о����������������Ŀ���� SLAM �㷨�������Ϣ���е��У�ѧϰ�����Ϣ��
ʵ�鷨��ʹ�� solidworks ��ģ��ͨ��һ�δ�ʵ������Ĵ������˵�����ģ�͵IJ��ֺ�����
2.3 ����
�Ĵ�ʽ�����˽�ģ˼·
�Ĵ�С���ڵ����н������У�ͨ���������������ת����������ͨ�����ϵ��ֳݺ��Ĵ���֮��������ϴ�����������ת�ص������£������Ĵ�����������Ĵ�������ֽӴ�������ǰ��Ħ�������Ӷ�����С����ǰ������ת�����С�����ʻ�����У���С����Ҫת��ʱ�� ͨ�����Ƶ��ת�ٺ�ת����ʵ�������ַ���ĸı䣬�����Ĵ�ת��仯��ʵ��С��ת��
����ѡ��
ѡ����ݮ�� 4B ��Ƭ��������װ linux ϵͳ���� opencv �� python��ʹ�� hector �㷨���� slam��ͼ��karto �㷨���� slam ��ͼ��
���ѡ��
ѡ�� M3508 ֱ����ˢ���ٵ����M3508 ���ٵ����װӵ��ҵ�����ȵĹ����ܶȣ����ṩ���ʵ�ͬʱ�������������Ϊͬ�ȼ��豸�� 20%����ʡ�����ռ䣬������ද�������ö��ִ����������Զ���Ӧ���¡����ߵ��쳣״������ʱ����,���ٶ�λ���ϣ�ʹ�ø���ȫ��M3508 ���ٵ����װ֧�� PWM �ź�������ƺ� CAN ����ָ�����*��CAN ������ʵʱ��ȡ���ת��λ�õ�״̬��Ϣ��
M3508 ���ٵ����װ����ʸߴ�220W�����Ť��5N-m*;����������150W������Ť��2.8 N-m*��
SLAM �㷨���
�Ӿ� SLAM ����������Ҫ���Է�Ϊ���:��Ϣ�ɼ���ǰ���Ӿ���̼ơ�����Ż����ջ���⡢
��ͼ��ǰ���Ӿ���̼�ͨ����ȡ��ƥ��ͼ�������е�������Ӷ��õ�·��㲢���Ƴ������ǰ��λ�ˣ�ʵ��ʵʱ��λ�����ڼ���ڵ��ۻ�����ɺ���Ż����ָ���֡��Ĺ��ӹ�ϵ�ȷ���������������߸����뽨ͼ�ľ��ȡ���λ�˹����ڼ��������֡ͼ������ƶȴﵽһ��������Ϊ�γ��˱ջ�������֡ͼ��֮�������·����λ�˽���һ���Ż��������Ż���������·����������ڽ�ͼ����ͼ�ľ��Ƚ�ֱ��Ӱ�������̬·���滮��ʵʱ���ϵȹ�����Ч����
������ҵ��ƽ��ȼƻ�
|
2022
|
�� 11�� 1 ��-2022 �� 11 �� 5 �գ����ϲɼ�����У��������ײ��ĵȡ�
|
|
2022
|
��11 ��6 ��-2021 ��11 ��10 �գ������������ϣ����������ݽ�����Ч������
|
|
2022
|
�� 11 �� 11 ��-2022 �� 11 �� 20 �գ������ƿ��ⱨ�档
|
|
2022
|
��11 ��21 ��-2023 ��1 ��10 �գ�����Ӳ�����ϵ�ѡ���Լ�������ѧϰ��
|
|
2023
|
��1 ��11 ��-2023 ��2 ��10 �գ���ɷ�������Ͱ��������ƣ���ģ�������ơ�
|
|
2023
|
��2 ��11 ��-2023 ��3 ��13 �գ���������豸��
|
|
2023
|
��3 ��14 ��-2023 ��3 ��31 �գ����������豸�Գ�������Ż���
|
|
2023
|
��
|
4
|
��
|
1 ��-2023 �� 4
|
�� 7 �գ���ɿ����Է�������ʼд���ġ�
|
|
2023
|
��
|
4
|
��
|
8 ��-2023 �� 4
|
�� 20 �գ�������ij��塣
|
|
2023
|
��
|
4
|
��
|
21 ��- 2023 ��
|
5 �� 10 �գ���������ĺͶ��幤��������硣
|
�ġ�������������ʵ��ʩ
4.1 ����������ݮ��
�� �� ͷ M3508 ֱ����ˢ���ٵ��ʵ����
4.2 ��ʵ��ʩ
ѧУͼ����ṩ�˺���֪������
�塢�ο�����
[1]������,����ɽ,���ǻ�,������.���ܾ���Ѳ������˽ṹ���[J].��е���,2022,39(S2):31-34.DOI:1 0.13841/j.cnki.jxsj.2022.s2.003.
[2]�ֱ��,������,������.���� ROS ϵͳ�Ĺ�ѵ�������������˻����[J].��Ϣ��������Ϣ��,2022(10):
200-204.
[3]������,�����,��˧��.����Wi-Fi ͨѶ���Ĵ�ʽ��¥����С��[J].�Ƽ��봴��,2022(03):107-110.DOI: 10.15913/j.cnki.kjycx.2022.03.033.
[4]����,����,����.���� PROE �� ADAMS ���Ĵ�С����������[J].���������ѧѧ��(��Ȼ��ѧ��),2 020,36(04):43-47.
[5]����,��ͥ��,�Ž�,�ű�.���� STM32 ������ʵʱ��������Ĵ�С�����[J].�¼����¹���,2016(08):1 2-14.DOI:10.16635/j.cnki.1003-5311.2016.08.004.
|
|
|
ָ����ʦ���
|
ָ����ʦ��
��
|
��
|
��
|
|
��ҵ����쵼����С�����
|
�� �� �� ��
|
��
|
��
|