嫦娥三号软着陆轨道设计与控制策略摘要
本文研究的是嫦娥三号探测器在月球表面的软着陆问题。分析着陆轨道的特点, 设计探测器的着陆轨道与各阶段的控制策略,对我国太空探测计划具有重要意义。本文主要采用微分动力学方程、最优控制策略等方法对问题进行分析和解决。
针对问题一,首先根据近月点和远月点的已知高度,利用角动量守恒和机械能守恒定律求得嫦娥三号在两点处的速度大小及方向。其次,由于嫦娥三号的着陆轨迹尚未确定,仅根据题给的着陆点信息无法确定近月点的精确位置,故通过构造假设:(1) 嫦娥三号在着陆过程中近似于沿着一条经线着陆,运动中仅改变纬度大小;(2)主减速阶段的水平路程近似为软着陆全程的水平路程。从而求出近月点在理想状态下的近似位置。最后通过问题二设计的轨道控制策略,进一步修正近月点和远月点的精确位置。得到嫦娥三号在近月点和远月点处的速度及位置如下表所示:
|
地点
|
经度
|
纬度
|
高度
|
速度大小
|
速度方向
|
|
近月点
|
19.51W
|
29.08N
|
15 km
|
1.6927 km/s
|
逆时针沿切线方向
|
|
远月点
|
160.49E
|
29.08S
|
100 km
|
1.6144 km/s
|
逆时针沿切线方向
|
针对问题二,忽略月球自转及摄动因素,将嫦娥三号的着陆过程近似为在一个平面内的运动,构建二维坐标系对嫦娥三号 6 个阶段进行控制策略设计。结果如下:
对于着陆准备轨道阶段,以变轨时间最短为目标函数,采用推力最大策略变轨进入椭圆轨道,得到最短变轨时间为 21.07s。
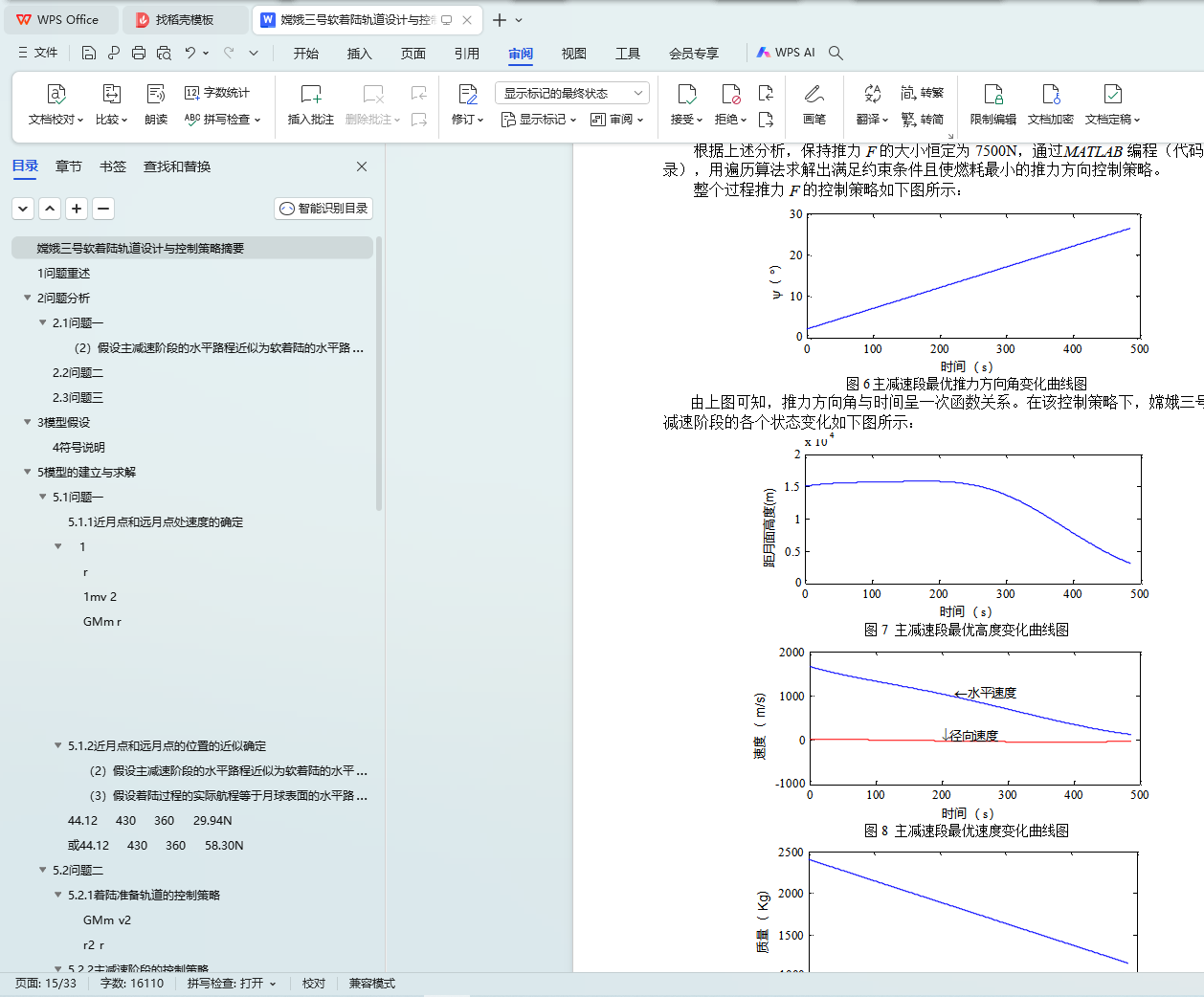
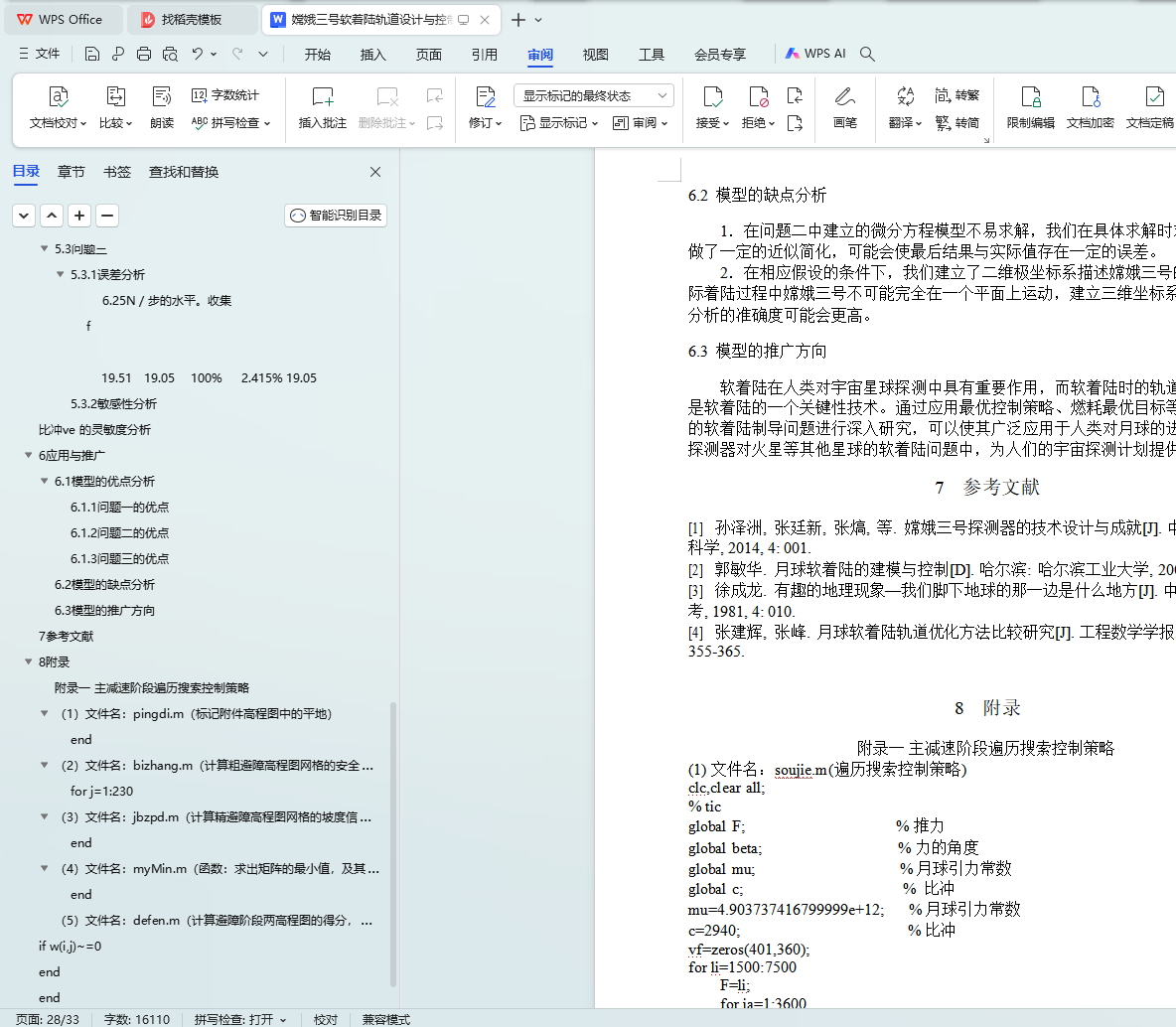
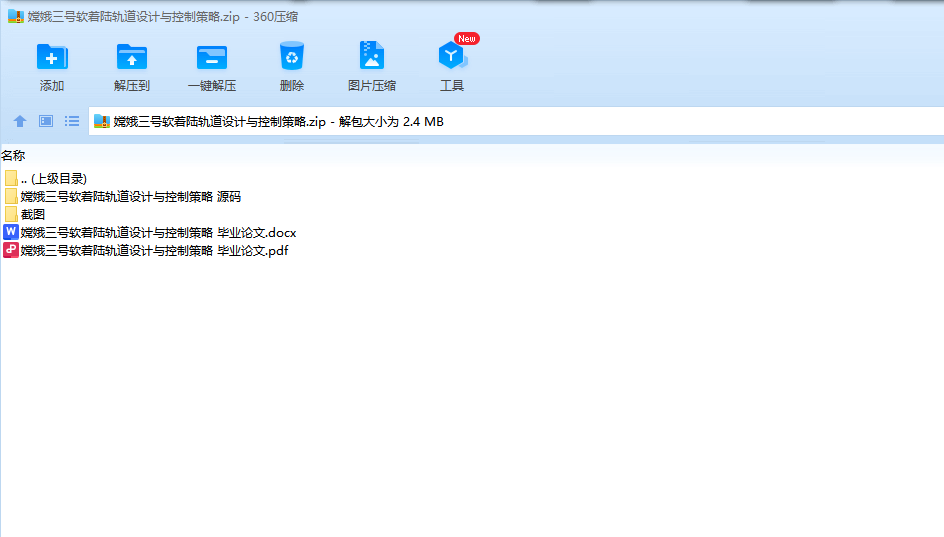
对于主减速阶段,引入二维极坐标下的微分动力学方程描述运动过程,以燃耗最小为优化目标,采用推力大小恒为最大值 7500N 且角度线性变化的控制策略,求得推进剂质量消耗的最小值为 1242.3kg;对于快速调整阶段,以最小燃耗为目标,以在降至 2.4km 高度前水平速度达到零为约束条件,建立非线性规划模型,采用与水平速度反向的变推力为控制策略,得到推进剂质量消耗为 20kg。
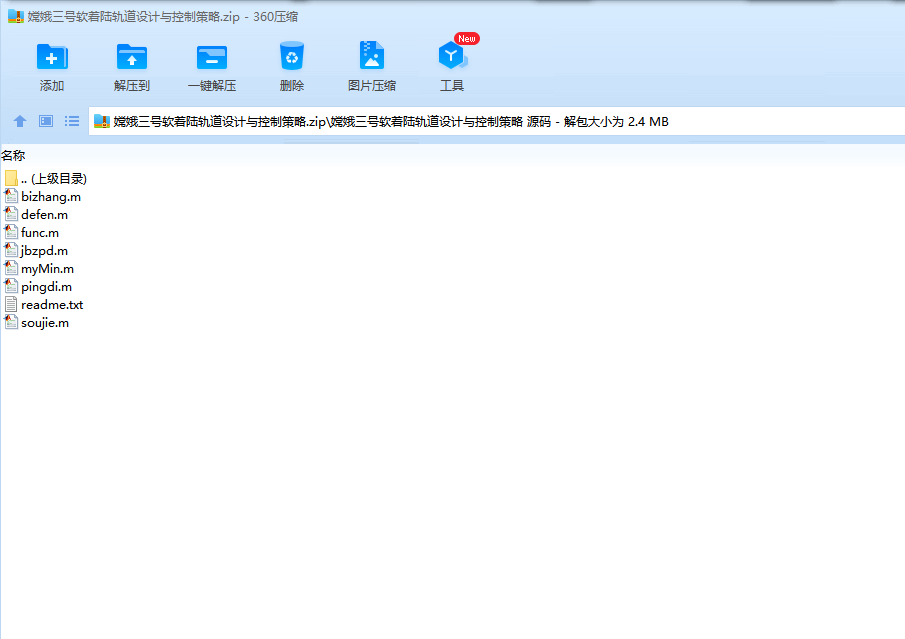
对于粗避障阶段,将着陆的控制策略分为最优着陆区域的查找和着陆过程的控制两方面。在着陆区域的查找阶段,通过图像高程值众数± 4 高程值定义平地,将高程图划分为若干个 10 ´ 10 像素的单元格,以各单元格高程方差最小,平移距离最近为目标函数,以 7:3 的权重对每个单元格求加权得分,从而选取最优着陆区。在着陆过程的控制阶段,对着陆过程进行动力学分析,给出沿直线方向到达着陆区域的控制策略。
对于精避障阶段,控制策略与粗避障相似,但对月面的识别精度及对落地区域的平稳程度要求远高于粗避障阶段。故将高程图划分为 50´ 50 像素进行讨论,同时定义每个像素点与其周围 8 个点的差值平方和为其坡度,用以反映平面的平稳程度,从而更精确求出最佳落地区域。精避障在着陆过程的控制方案与粗避障相同。
对于缓速下降阶段,由于其时间较短,故认为探测器质量不发生变化。在此基础上,利用动力学知识,推导出发动机推力与初始速度的关系式即控制策略。
针对问题三,从着陆的初始条件、可调节推力的延时及月球自转三方面考虑误差。对于初始条件,从月球半径的选取、初始高度的不确定及初始速度的理想计算三个角度分析系统误差,得到它们对主减速阶段的角速度、线速度及水平路程的影响结果。对于推力延时误差,通过控制频率及单步推力分辨率,求得推力从 0 增大至 7500N 需要 1.2s 时间。对于月球自转误差,求得近月点经度的相对误差达 2.42%。其次,针对嫦娥三号的运行高度、径向速度及水平速度,通过推力、近月点高度和比冲三个变量以± 5%变动进行灵敏度分析,同时联系实际进行稳定性说明。
关键词:最优控制 微分方程 避障规划 灵敏度分析
目录
嫦娥三号软着陆轨道设计与控制策略摘要
1 问题重述
2 问题分析
2.1 问题一
(2)假设主减速阶段的水平路程近似为软着陆的水平路程。
2.2 问题二
2.3 问题三
3 模型假设
4 符号说明
5 模型的建立与求解
5.1 问题一
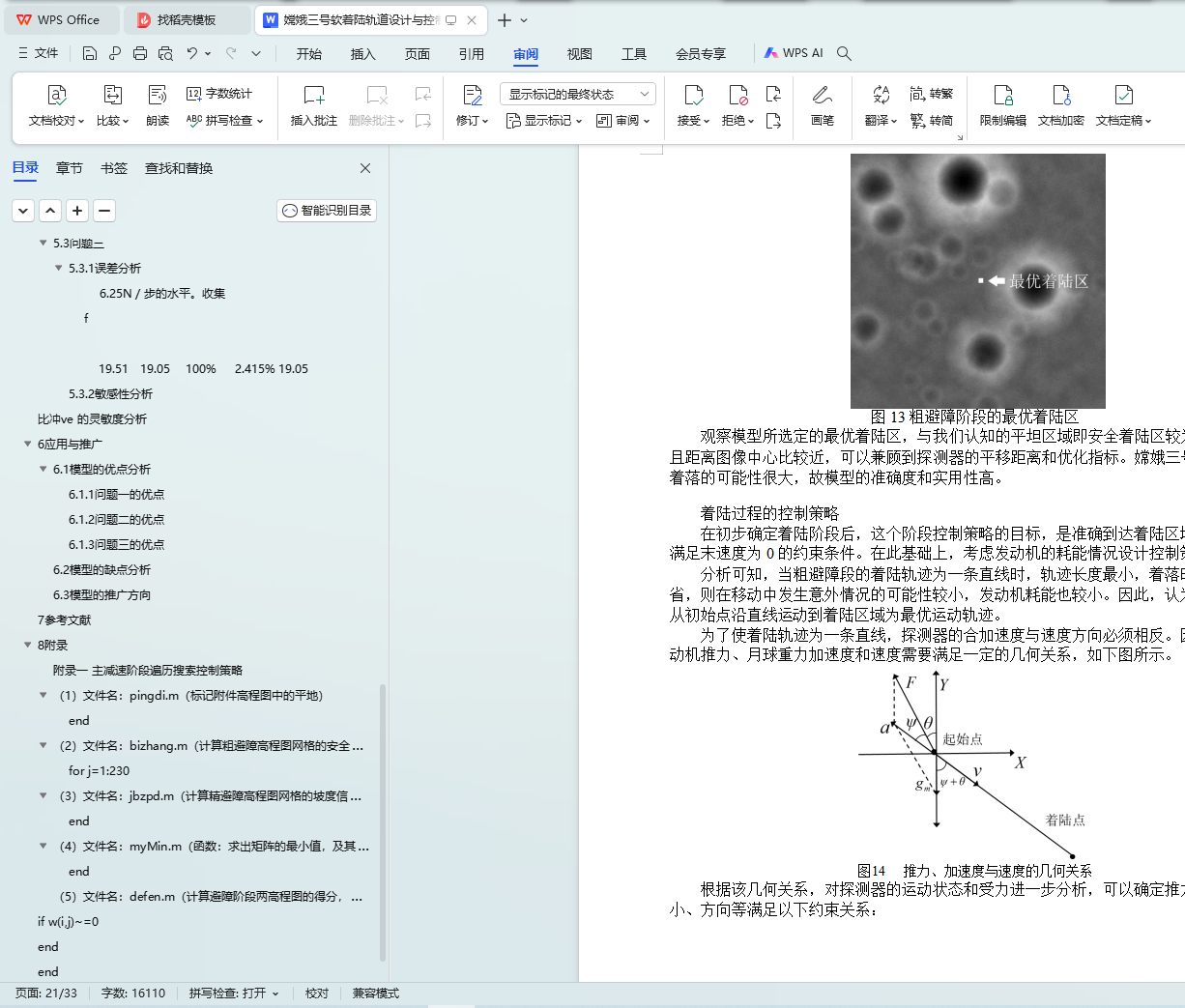
5.1.1 近月点和远月点处速度的确定
ï1
ì
ï
í
î
5.1.2 近月点和远月点的位置的近似确定
44.12 - 430 ´ 360 = 29.94N
或44.12 + 430 ´ 360 = 58.30N
5.2 问题二
5.2.1 着陆准备轨道的控制策略
5.2.2 主减速阶段的控制策略
ì
ï
ï
44.12 - 456.32 ´ 360 = 29.079N
5.2.3 快速调整阶段的控制策略
í
5.2.4 粗避障阶段的控制策略
í
(19)
5.2.5 精避障阶段的控制策略
5.2.6 缓速下降阶段的控制策略
h
5.3 问题三
5.3.1 误差分析
¢
e = 19.51-19.05 ´100% = 2.415% 19.05
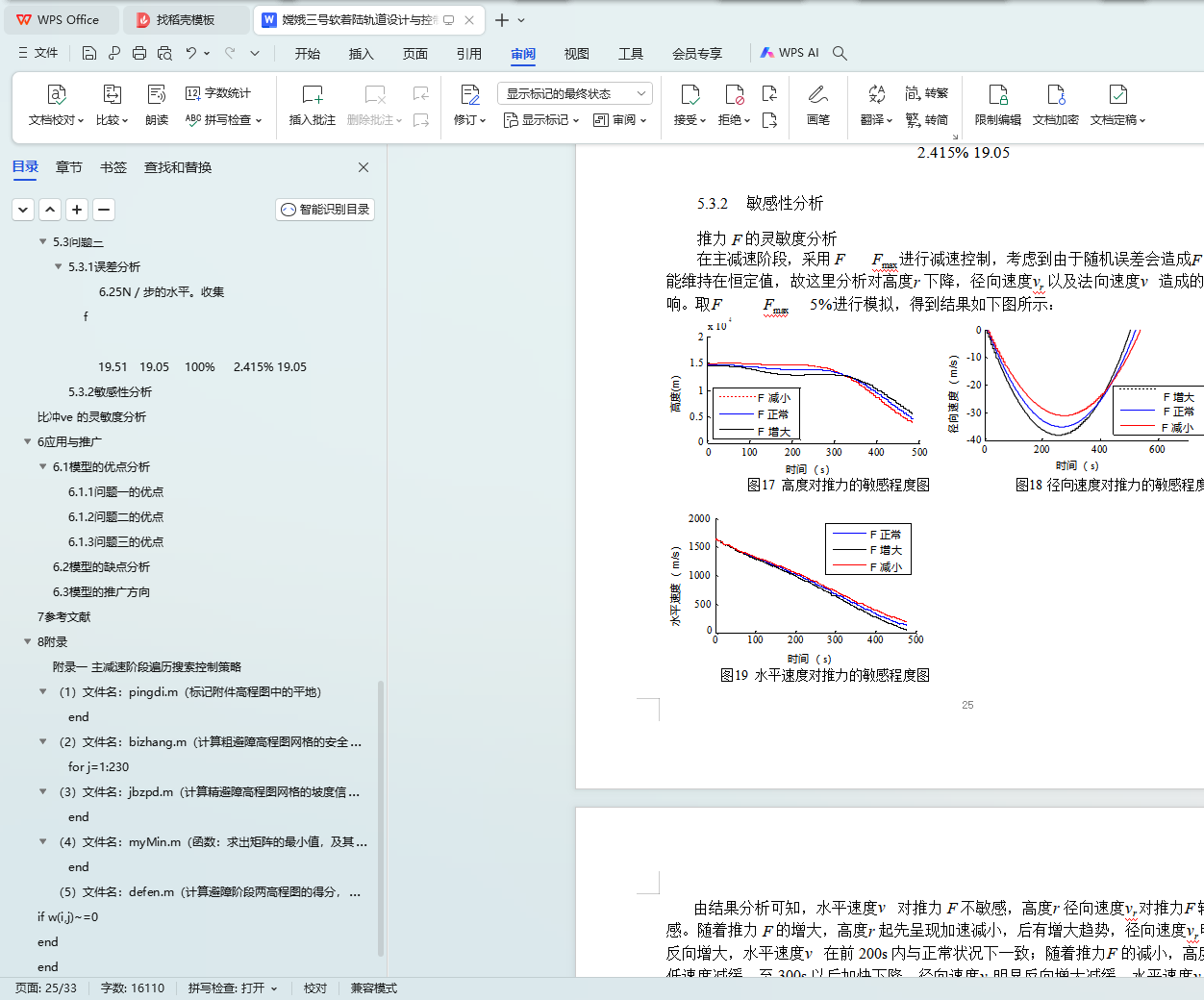
5.3.2 敏感性分析
比冲ve 的灵敏度分析
6 应用与推广
6.1 模型的优点分析
6.1.1 问题一的优点
6.1.2 问题二的优点
6.1.3 问题三的优点
6.2 模型的缺点分析
6.3 模型的推广方向
7 参考文献
8 附录
附录一 主减速阶段遍历搜索控制策略
(1)文件名:pingdi.m(标记附件高程图中的平地)
end
(2)文件名:bizhang.m(计算粗避障高程图网格的安全信息)
for j=1:230
(3)文件名:jbzpd.m(计算精避障高程图网格的坡度信息)
end
(4)文件名:myMin.m(函数:求出矩阵的最小值,及其对应下标)
end
(5)文件名:defen.m(计算避障阶段两高程图的得分,求出最优着陆区)
if w(i,j)~=0
end
end
end
% for i=1:10