摘 要
随着农业技术的不断进步和劳动力成本的不断上升,农业机器人的研究和应用逐渐受到广泛关注。辣椒作为一种重要的蔬菜作物,其采摘过程中存在着劳动强度大、效率低下等问题。因此,研究和开发一种能够高效、准确地采摘辣椒的机器人具有重要的现实意义和应用价值。本选题来源于对现代农业技术发展趋势的深入了解和对辣椒种植业的实际需求分析,旨在通过辣椒采摘机器人的结构设计,推动农业机器人的发展,提高农业生产的自动化和智能化水平。同时,本选题也结合了当前机械设计和制造技术的最新进展,为农业机器人的研发提供了理论支持和实践指导。
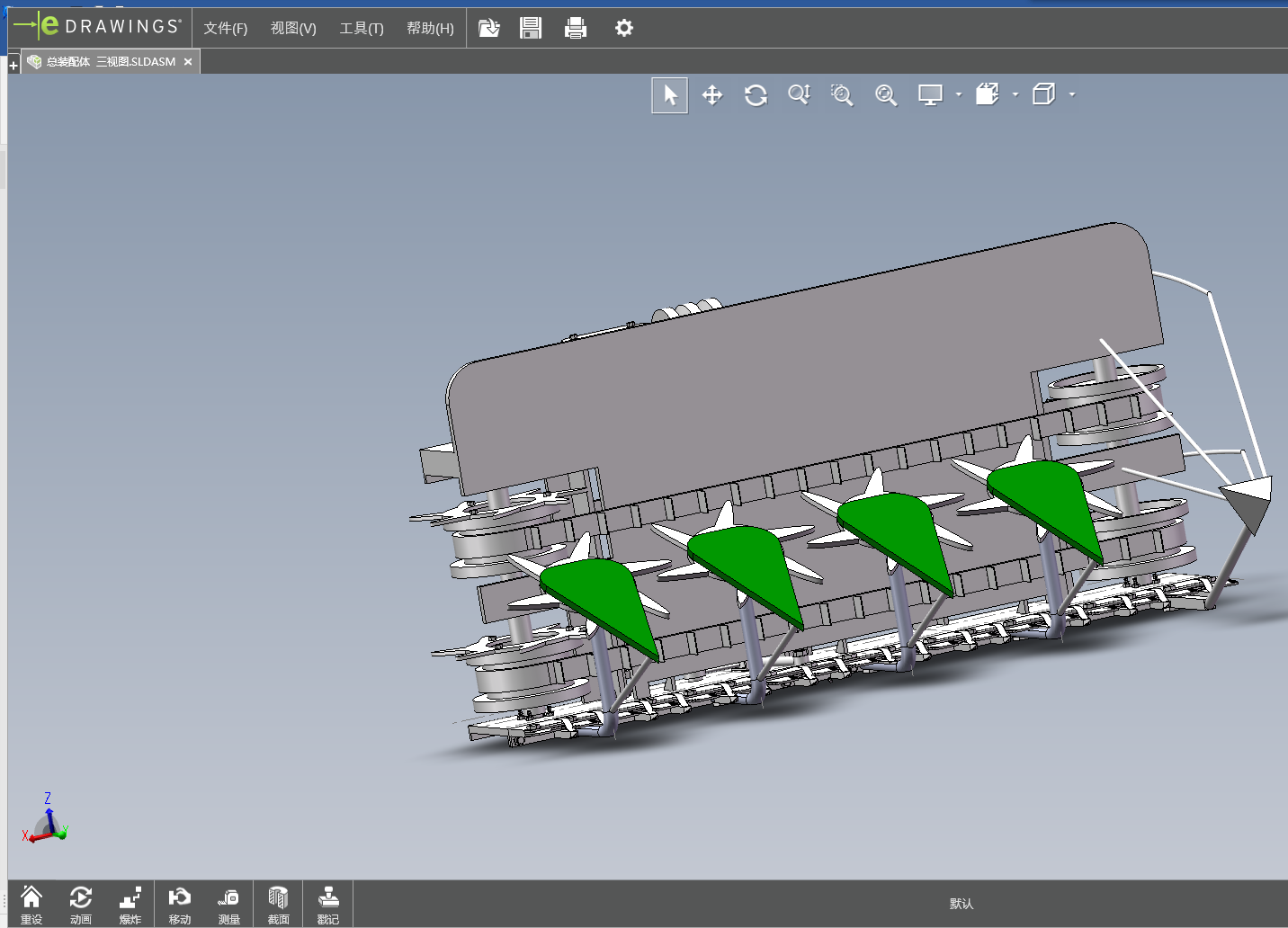
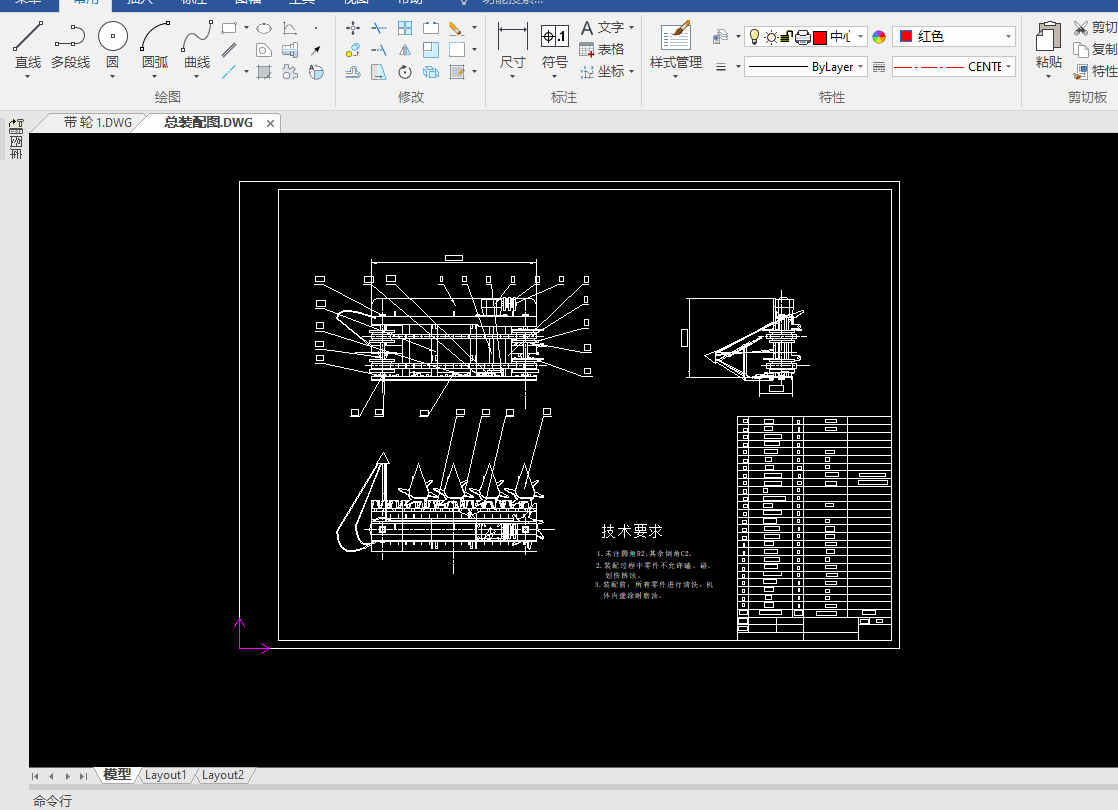
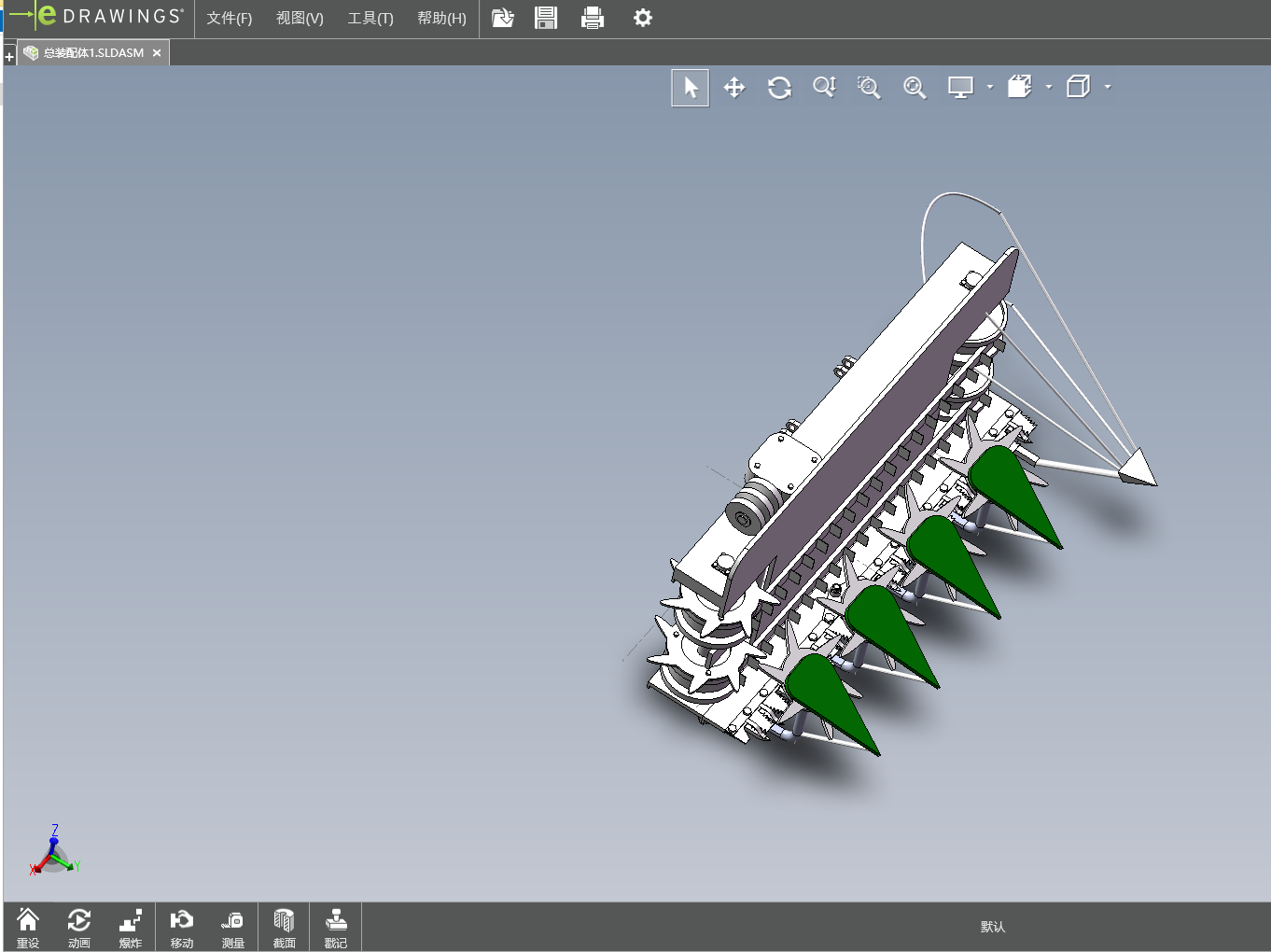
本文旨在设计和研究一种辣椒采摘机器人的整体结构设计及其关键部件的协同工作原理。首先,通过对辣椒生长特性及采摘需求分析,确定了采摘机器人的基本功能要求和技术参数。在此基础上,设计了辣椒采摘装置,包括采摘爪、夹紧力调节装置和振动装置等关键部件,并建立了采摘机器人的机械运动模型。研究过程中,采用了机械设计理论,结合Solidworks等三维建模软件,对采摘机器人的各个部件进行了详细的二维和三维建模。同时,通过仿真分析和实验验证,优化了采摘爪的夹持力和振动装置的参数设置,实现了辣椒的高效、无损采摘。本文的研究不仅为辣椒采摘机器人的设计和制造提供了理论支持和实践指导,也为农业机器人的发展提供了有益的参考。
关键词:辣椒采摘机器人;采摘装置;Solidworks建模;机械运动模型;夹紧力调节装置
目 录
1绪论
1.1课题研究的意义
1.2国内外辣椒采摘机器人发展状况
1.4研究的内容和方法
1.5预期目标
1.6重点研究的关键问题及解决思路
1.7工作条件及解决方法
2辣椒采摘机器人总体设计
2.1收获的典型方法及收获方案的选择
2.2辣椒采摘机器人机的结构
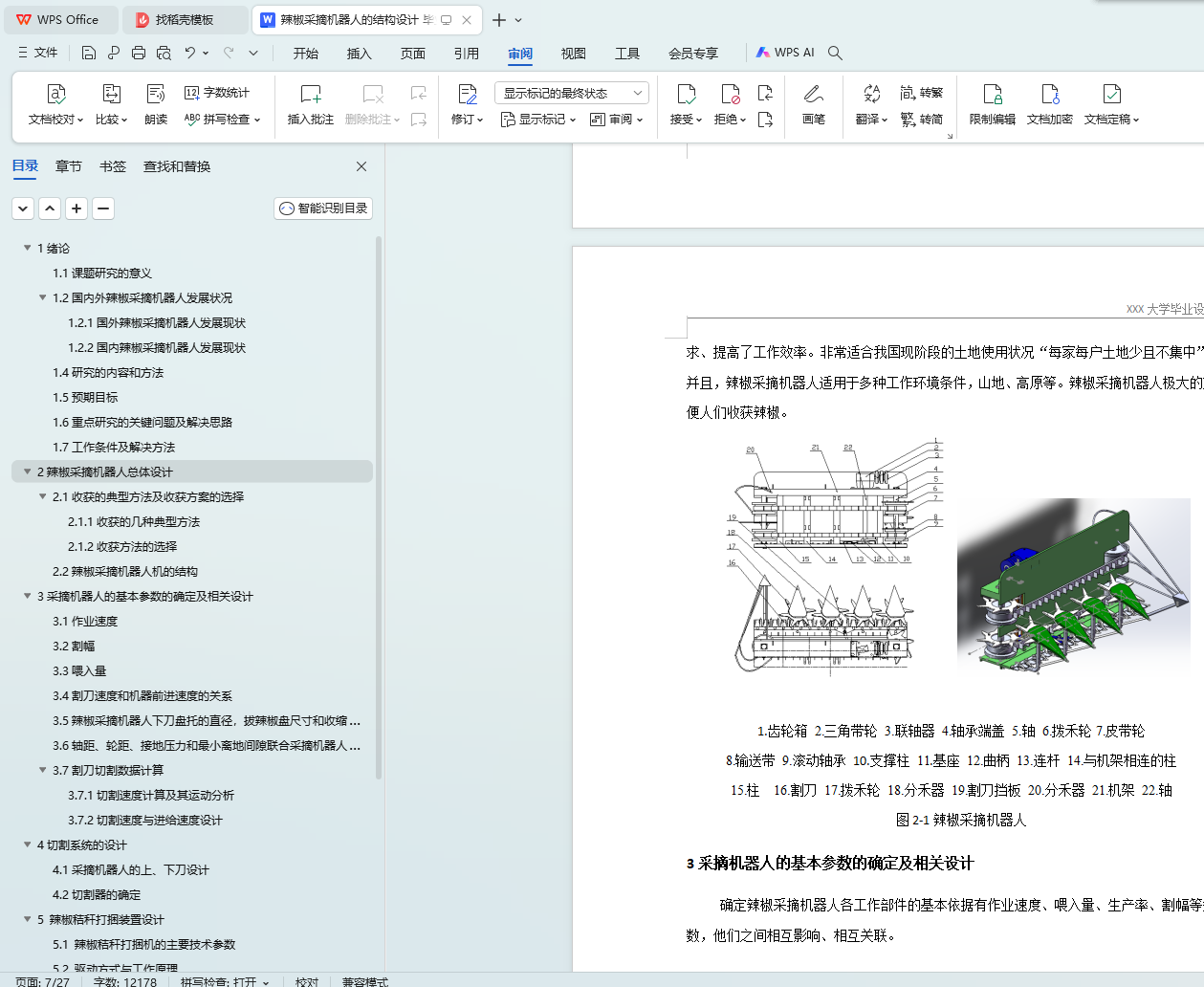
3采摘机器人的基本参数的确定及相关设计
3.1作业速度
3.2割幅
3.3喂入量
3.4割刀速度和机器前进速度的关系
3.5辣椒采摘机器人下刀盘托的直径,拔辣椒盘尺寸和收缩比
3.6轴距、轮距、接地压力和最小离地间隙联合采摘机器人的轴距
3.7割刀切割数据计算
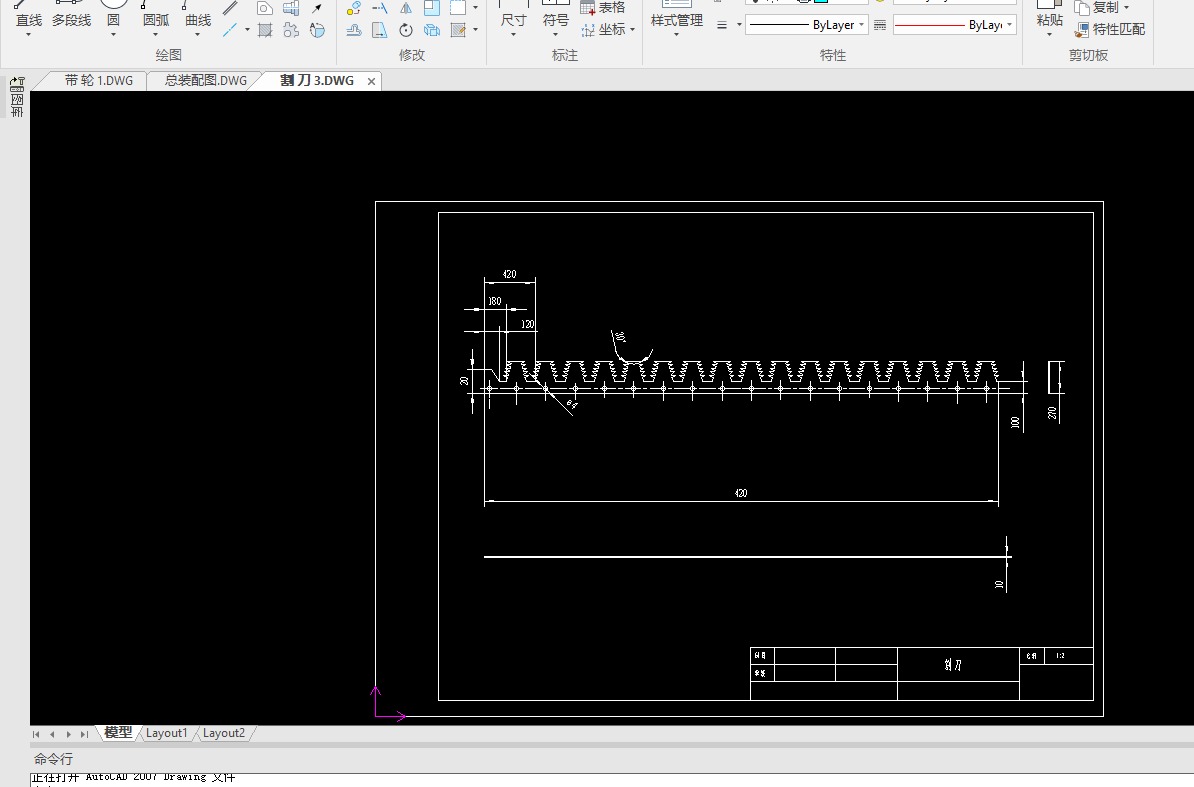
4切割系统的设计
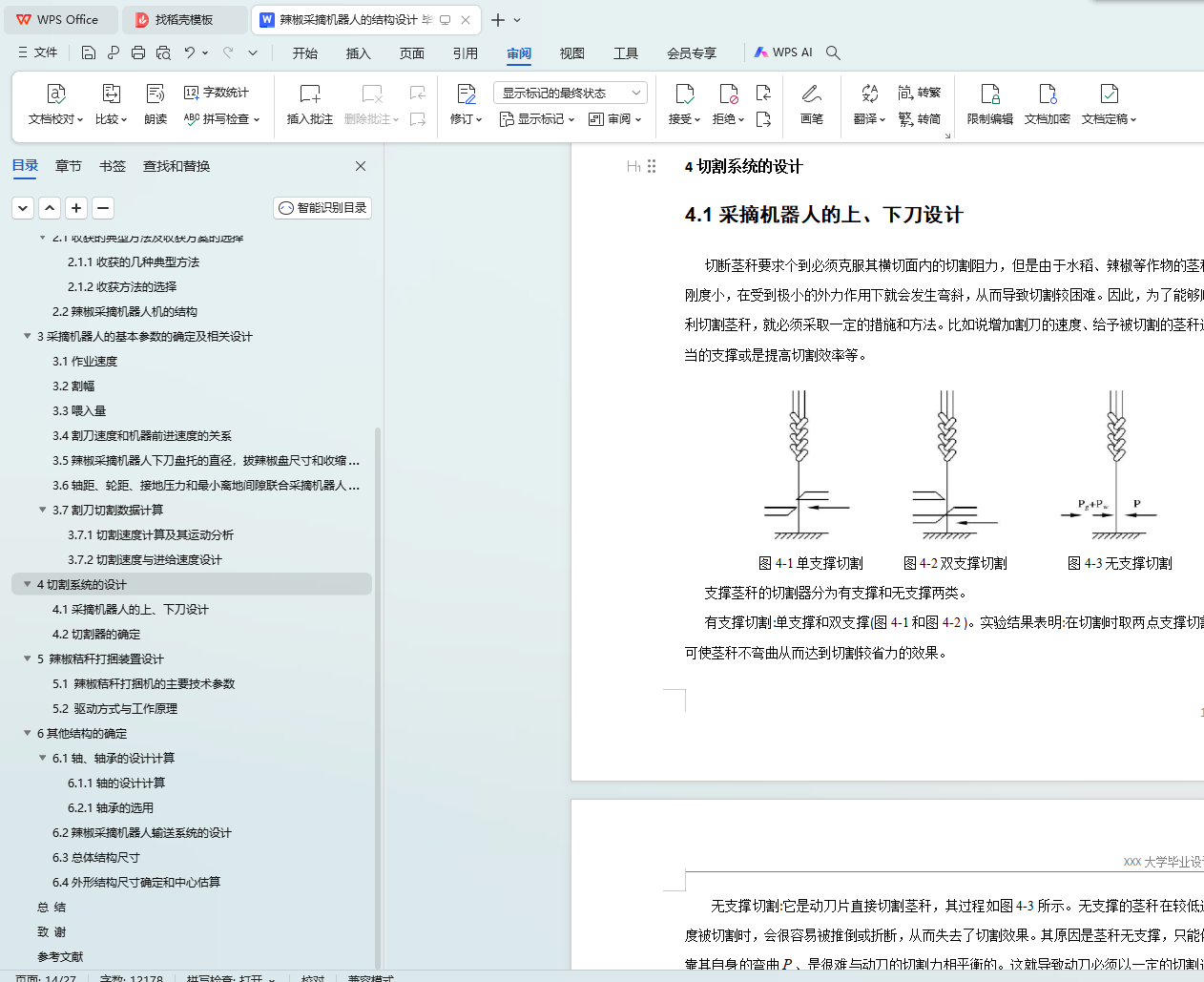
4.1采摘机器人的上、下刀设计
4.2切割器的确定
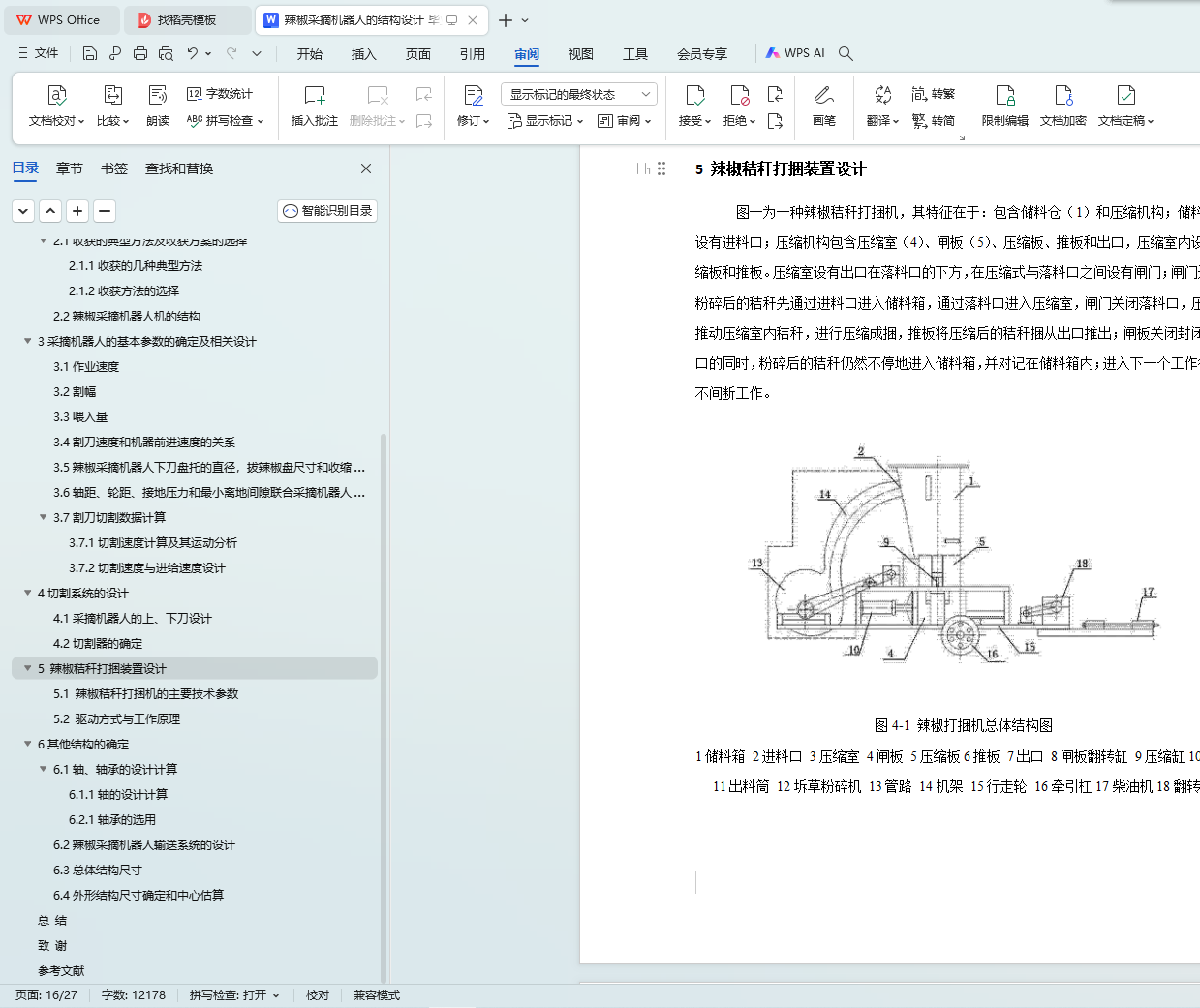
5 辣椒秸秆打捆装置设计
5.1 辣椒秸秆打捆机的主要技术参数
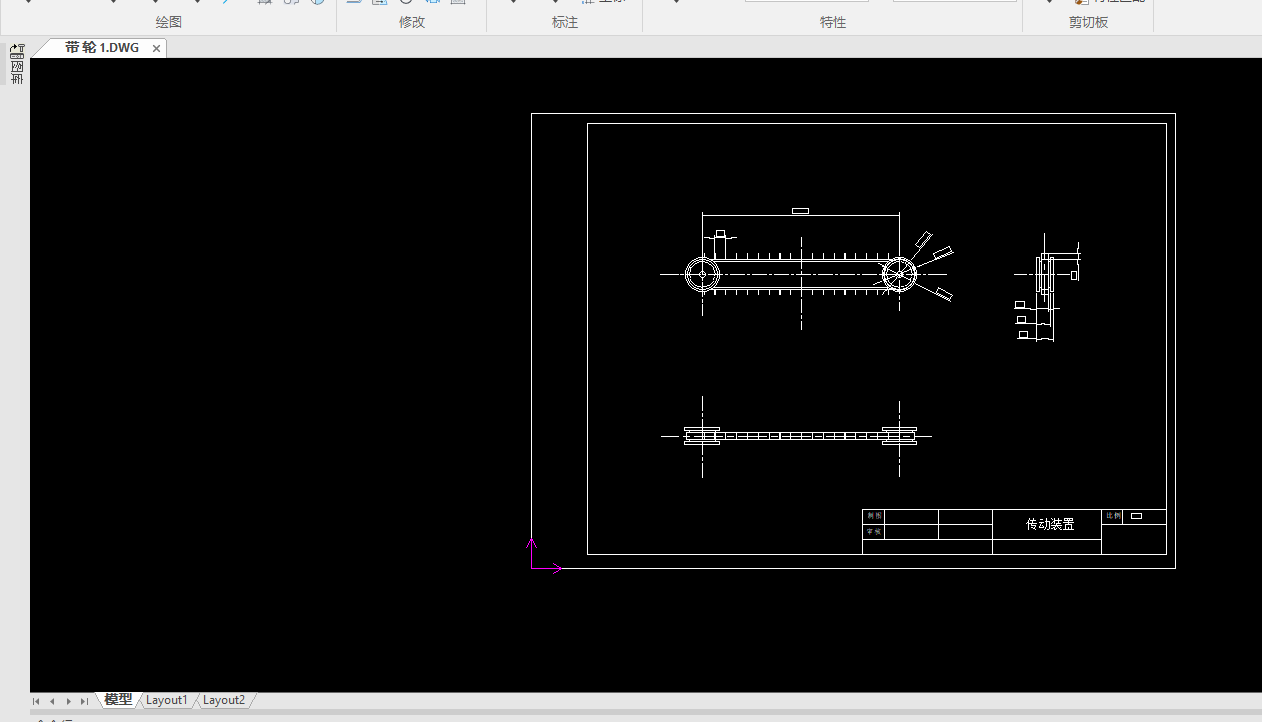
5.2 驱动方式与工作原理
6其他结构的确定
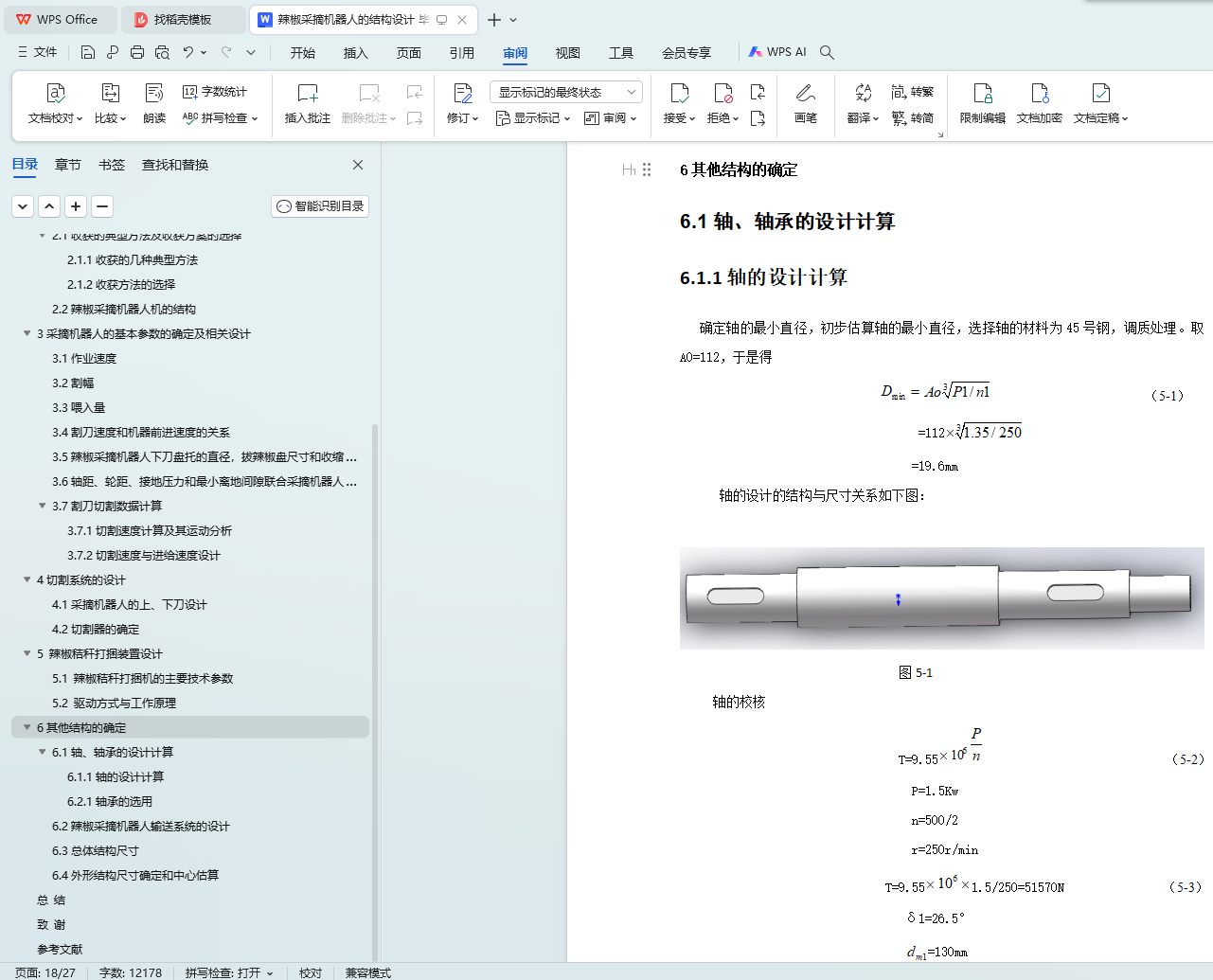
6.1轴、轴承的设计计算
6.2辣椒采摘机器人输送系统的设计
6.3总体结构尺寸
6.4外形结构尺寸确定和中心估算
总 结
致 谢
参考文献
参考文献 23