摘 要
首先,随着无人机技术的快速发展,低成本、高可靠性的导航系统成为无人机技术发展的关键需求。特别是对于一些小型和消费级的无人机,如何在保证性能的同时降低制造成本,成为了一个亟待解决的问题。因此,研究基于MEMS器件的低成本无人机捷联惯导系统具有重要的实际应用价值。其次,微机电系统(MEMS)器件具有体积小、重量轻、功耗低、成本低等优点,使其在无人机导航系统中具有广泛的应用前景。通过集成陀螺仪和加速度计等MEMS器件,可以实现无人机姿态、速度和位置的精确测量,为无人机的自主飞行和导航提供关键信息。此外,STM32主控板作为一种功能强大、易于集成的微控制器,为基于MEMS器件的惯导系统设计提供了理想的硬件平台。通过STM32主控板对MEMS器件进行数据读取和融合处理,可以实现高效、稳定的导航参数输出。最后,捷联惯导算法和滤波算法是实现高精度导航的关键技术。通过深入研究这些算法,并结合实际应用场景进行优化和改进,可以进一步提高导航系统的性能和稳定性。
综上所述,基于MEMS器件的低成本无人机捷联惯导系统设计选题来源于无人机技术发展的实际需求,结合了MEMS器件和STM32主控板的优势,以及捷联惯导算法和滤波算法的应用,旨在开发一种性能优良、成本低廉的无人机导航系统,满足市场和技术发展的需要。
本文致力于设计一种基于微机电系统(MEMS)器件的低成本无人机捷联惯导系统。该系统采用集成了陀螺仪和加速度计的STM32主控板,实现对各个MEMS器件的数据读取与融合处理。通过采用捷联惯导算法和滤波算法,系统有效结合了陀螺仪和加速度计的优势,实现了精确的导航参数输出。实验结果表明,该惯导系统在动态和静态测试条件下,角度误差均小于±1°,满足了低成本无人机的导航需求。此外,本文通过主观和客观指标对实物实际结果进行了深入的分析与比较,进一步验证了系统的稳定性和可靠性。本文的研究成果为低成本无人机的导航系统设计提供了新的思路和方法。
关键词:MEMS器件;STM32主控板;捷联惯导系统;陀螺仪;无人机
Abstract
First of all, with the rapid development of UAV technology, the low-cost and high-reliability navigation system has become the key demand for the development of UAV technology. Especially for some small and consumer drones, how to ensure the performance while reducing the manufacturing cost, has become an urgent problem to be solved. Therefore, study low-cost UUsystem based on MEMS devices. Secondly, microelectromechanical system (MEMS) devices have the advantages of small size, light weight, low power consumption and low cost, which make them have wide application prospects in UAV navigation system. By integrating MEMS devices such as gyroscopes and accelerometers, accurate measurement of UAV attitude, speed and position can be achieved, providing key information for UAV autonomous flight and navigation. Moreover, the STM 32 master control board, as a powerful, easily integrated microcontroller, provides an ideal hardware platform for inertial navigation system design based on MEMS devices. Data reading and fusion processing of MEMS devices through the STM 32 master control board can achieve efficient and stable navigation parameter output. Finally, the inertial navigation algorithm and filtering algorithm are the key technologies to realize high-precision navigation. Through further study of these algorithms and combined with practical application scenarios, the performance and stability of the navigation system can be further improved.
To sum up, based on MEMS devices of low cost drone jet inertial navigation system design topic comes from the actual demand of drone technology development, combining the MEMS devices and STM 32 main control board, and the application of jet inertial navigation algorithm and filtering algorithm, aims to develop a good performance, low cost drone navigation system, meet the needs of the market and technology development.
This paper aims to design a low-cost UAV cross-linked inertial navigation system based on microelectromechanical system (MEMS) devices. The system adopts the STM 32 master control board integrated with gyroscope and accelerometer to realize the data reading and fusion processing of each MEMS device. By adopting the inertial navigation algorithm and filtering algorithm, the system effectively combines the advantages of gyroscope and accelerometer to achieve the accurate output of navigation parameters. The experimental results show that the angle error of the inertial navigation system is less than ± 1 under both dynamic and static test conditions, which meets the navigation requirements of the low-cost UAV. In addition, this paper deeply analyzes and compares the actual results through subjective and objective indicators to further verify the stability and reliability of the system. The results of this paper provide new ideas and methods for the navigation system design of low-cost UAV.
Key words: MEMS device; STM 32 main control board; GL-linked inertial navigation system; gyroscope; UAV
目录
摘 要
Abstract
1. 绪论
1.1 选题背景及意义
1.1.1 选题背景
1.1.2 选题意义
1.2 国内外研究现状及发展趋势
1.2.1 国内研究现状
1.2.2 国外研究现状
1.2.3 发展趋势
1.3研究内容及要求
2部分模型参数:
2. 模型建立
2.1 坐标系基准确定
2.2 比力方程推导
2.2.3 说明
2.3 姿态旋转角速度关系推导
2.3.3 说明
2.4 导航算法和定姿计算方法
2.5卡尔曼滤波滤波参数和矩阵
3. 惯性仿真计算
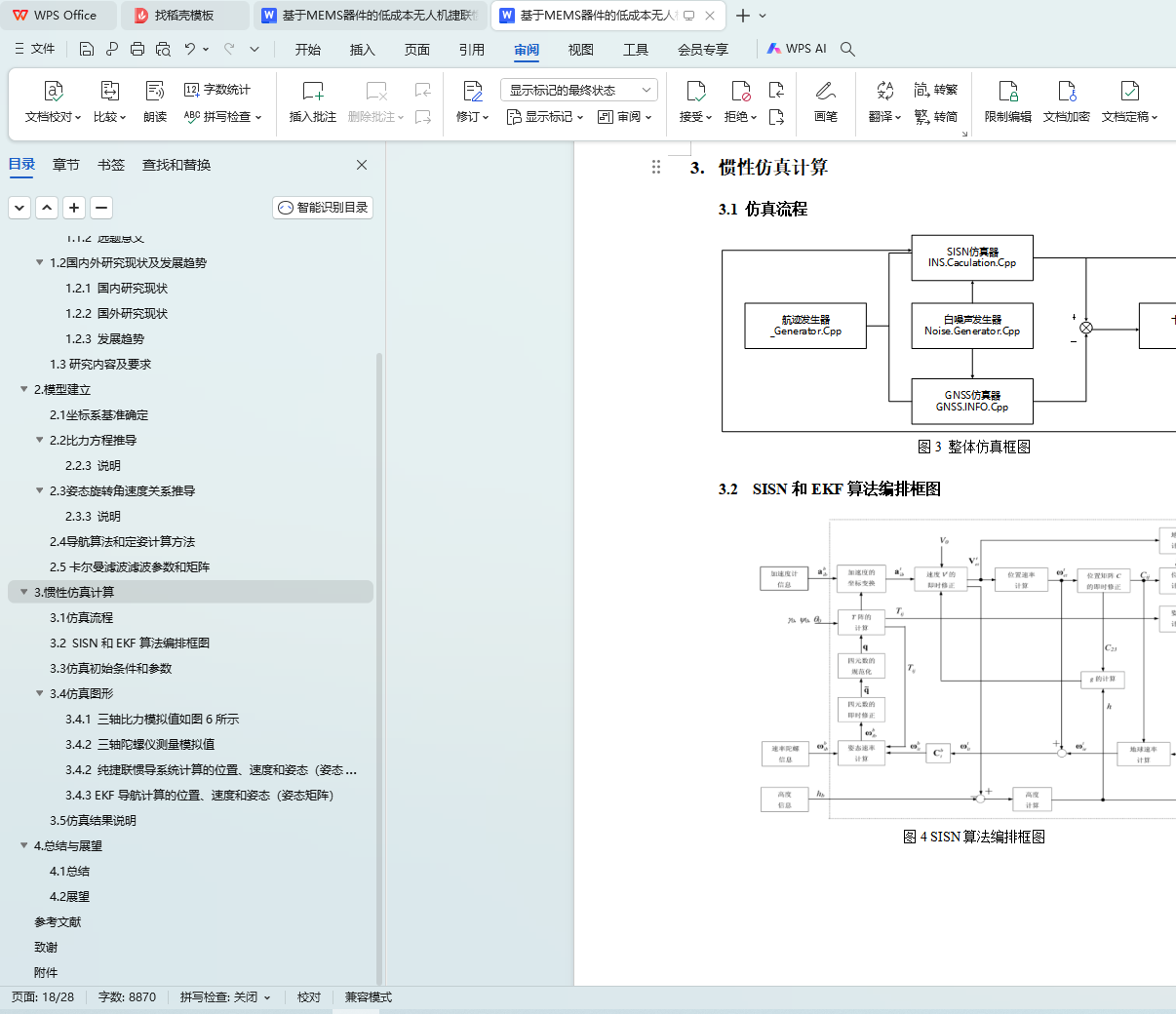
3.1 仿真流程
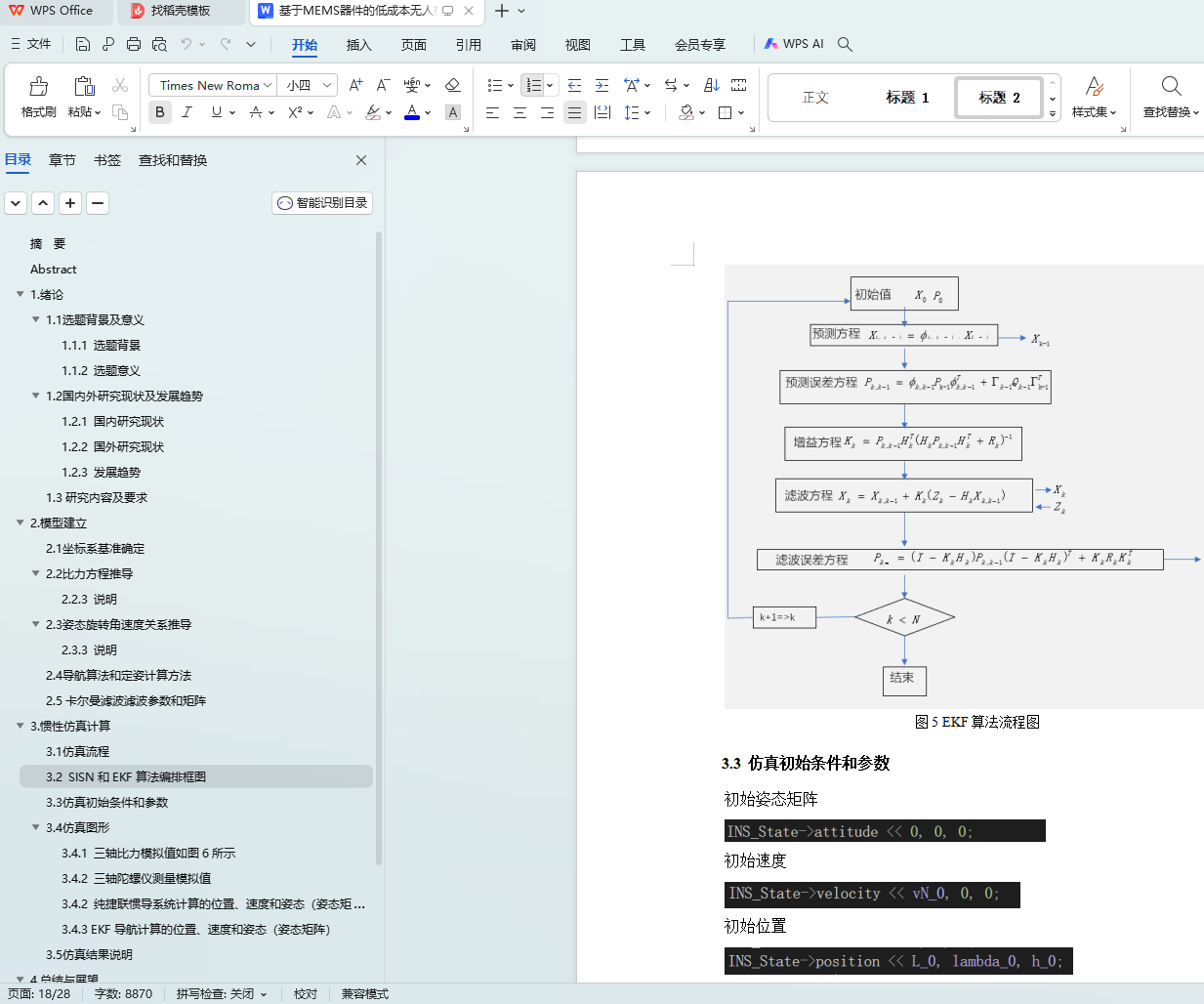
3.2 SISN和EKF算法编排框图
3.3 仿真初始条件和参数
3.4 仿真图形
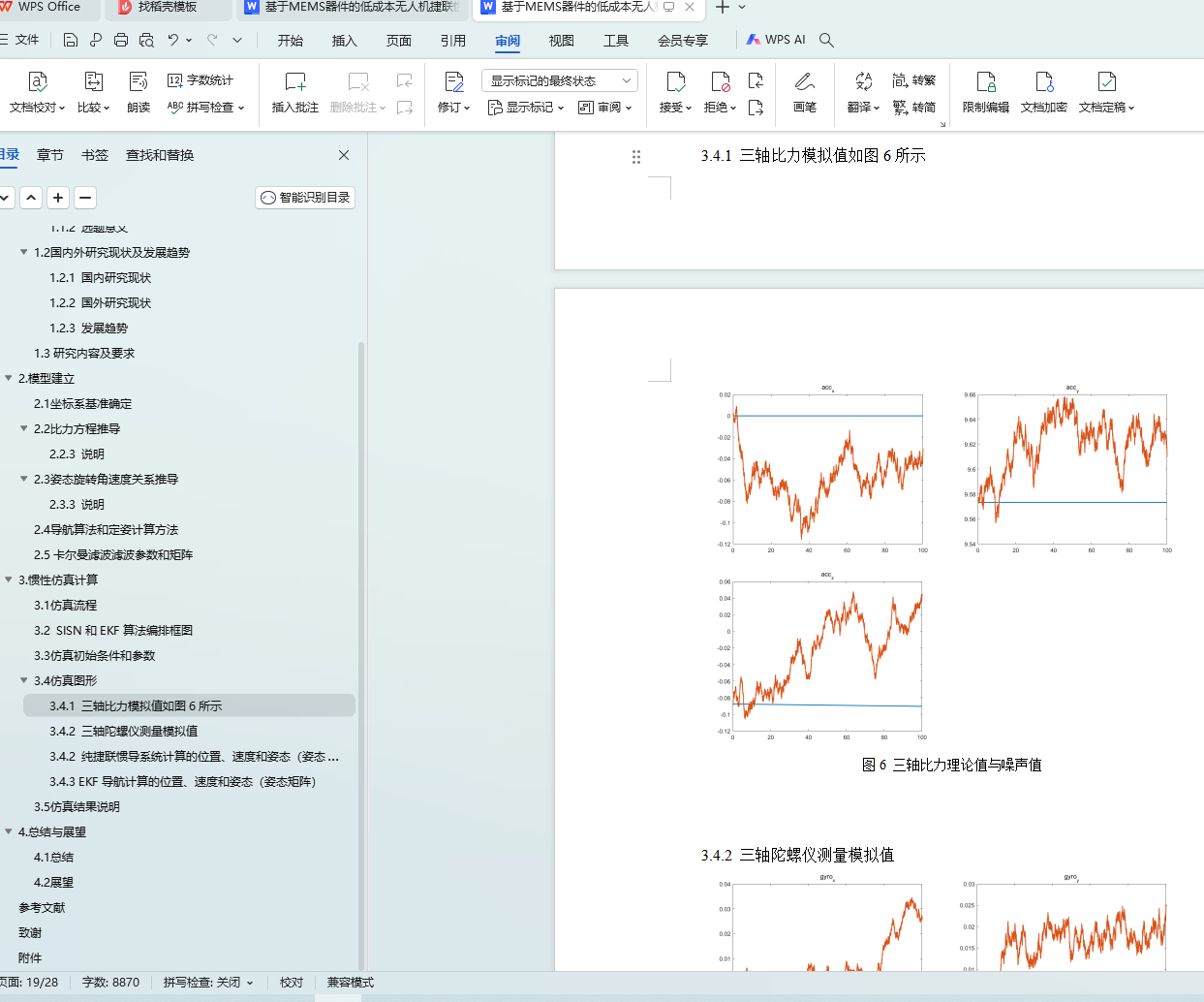
3.4.1 三轴比力模拟值如图6所示
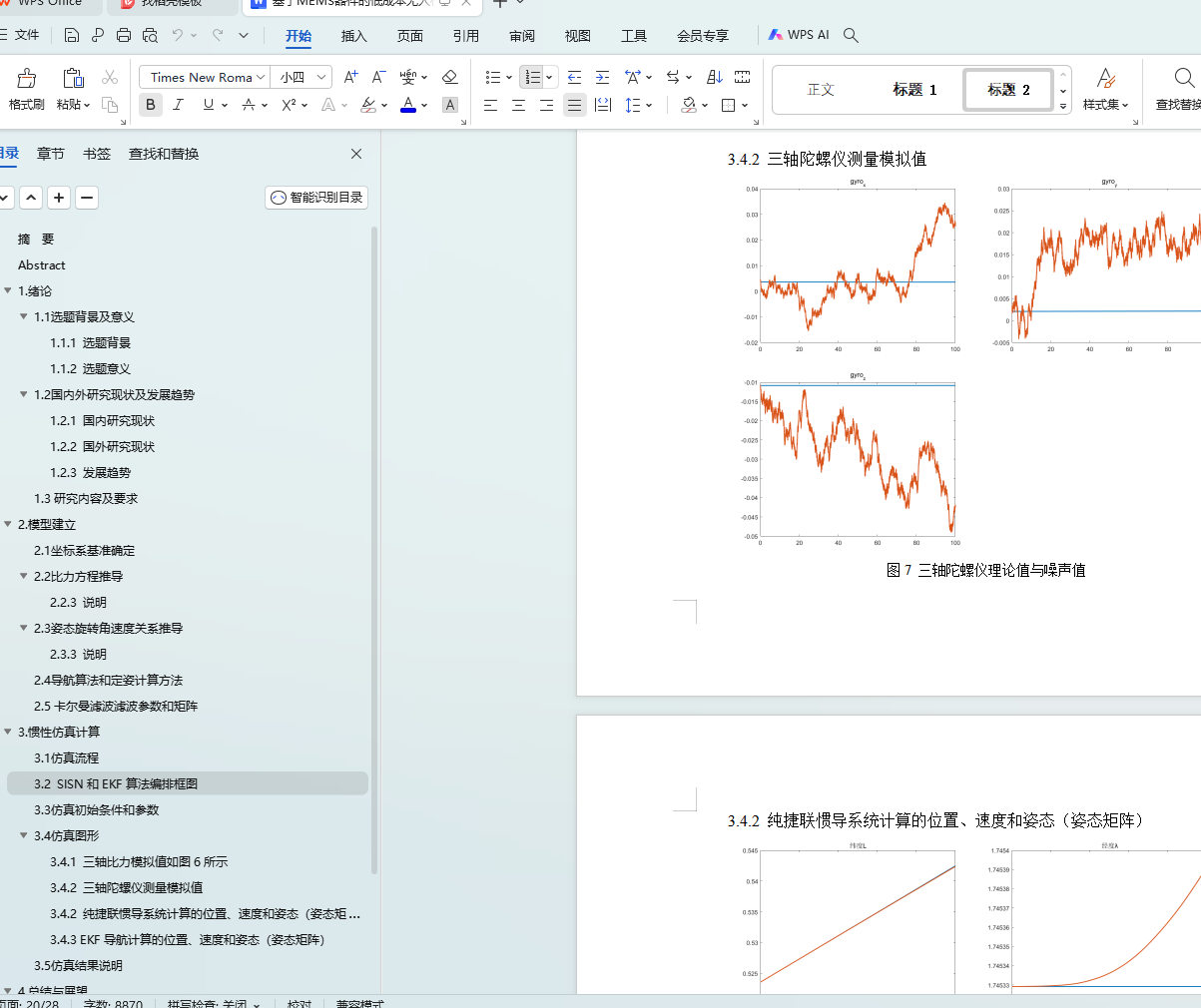
3.4.2 三轴陀螺仪测量模拟值
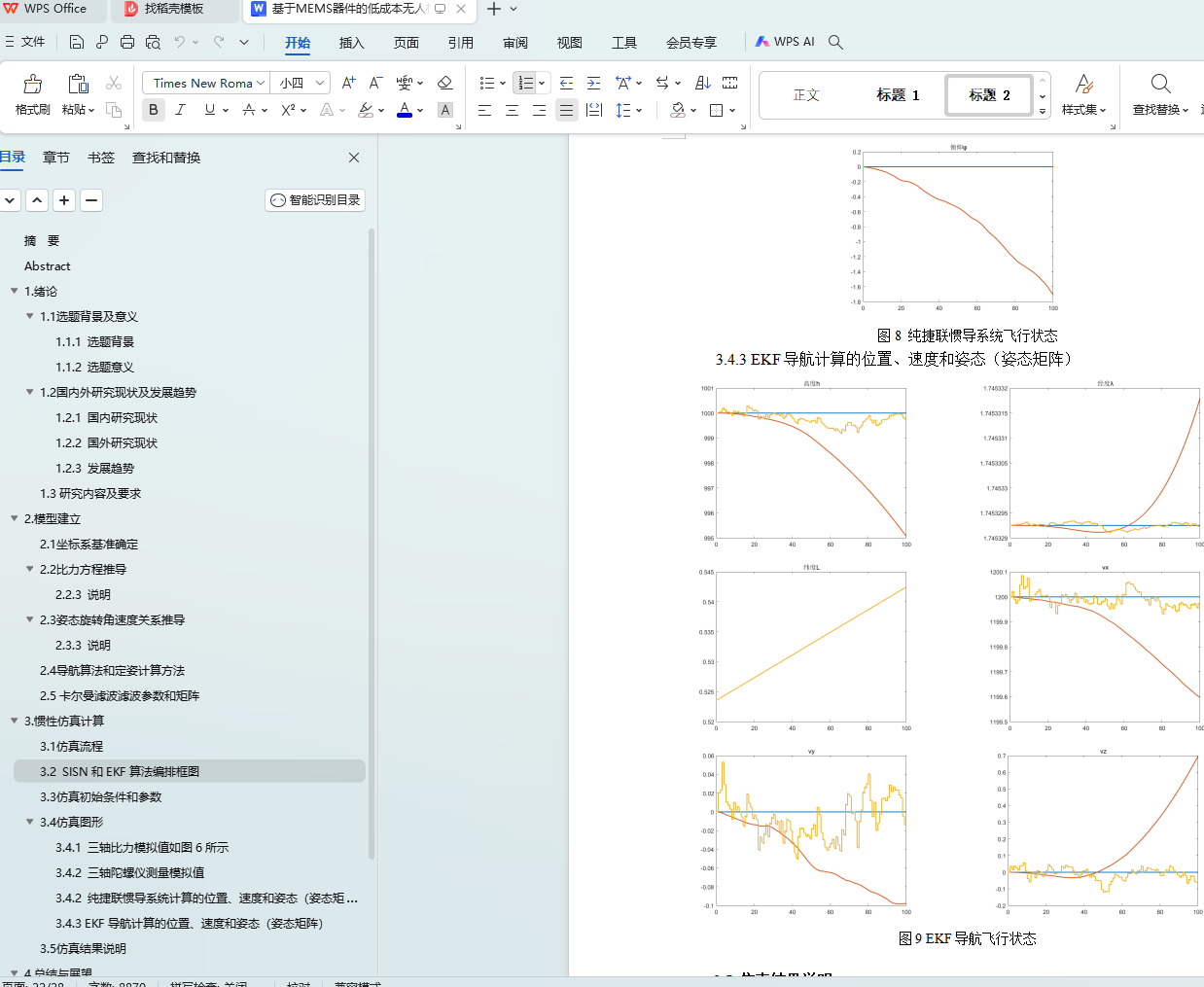
3.4.2 纯捷联惯导系统计算的位置、速度和姿态(姿态矩阵)
3.4.3 EKF导航计算的位置、速度和姿态(姿态矩阵)
3.5 仿真结果说明
4. 总结与展望
4.1 总结
4.2 展望
5. 参考文献
致谢
6. 附件