摘 要
中国作为一个人口众多的国家,加之计划生育政策的实施,随着时代的演进,社会结构正在经历显著的变化,其中人口老龄化现象日益成为公众关注的热点。随之而来的是医疗需求的显著增加,这不仅表现在就医人数的增长上,还体现在对长期用药以管理慢性疾病的患者数量的不断攀升。这导致医院药房的工作负荷急剧增加,药品的存储、管理和分发工作超出了一些药房的应对能力,给药师带来了极大的工作压力。为了缓解这一状况,许多医院开始采用自动化的药品分发设备,这些设备不仅提高了药品分发的效率,减少了药师的工作强度,还有效降低了因疲劳操作导致的药物分发错误。
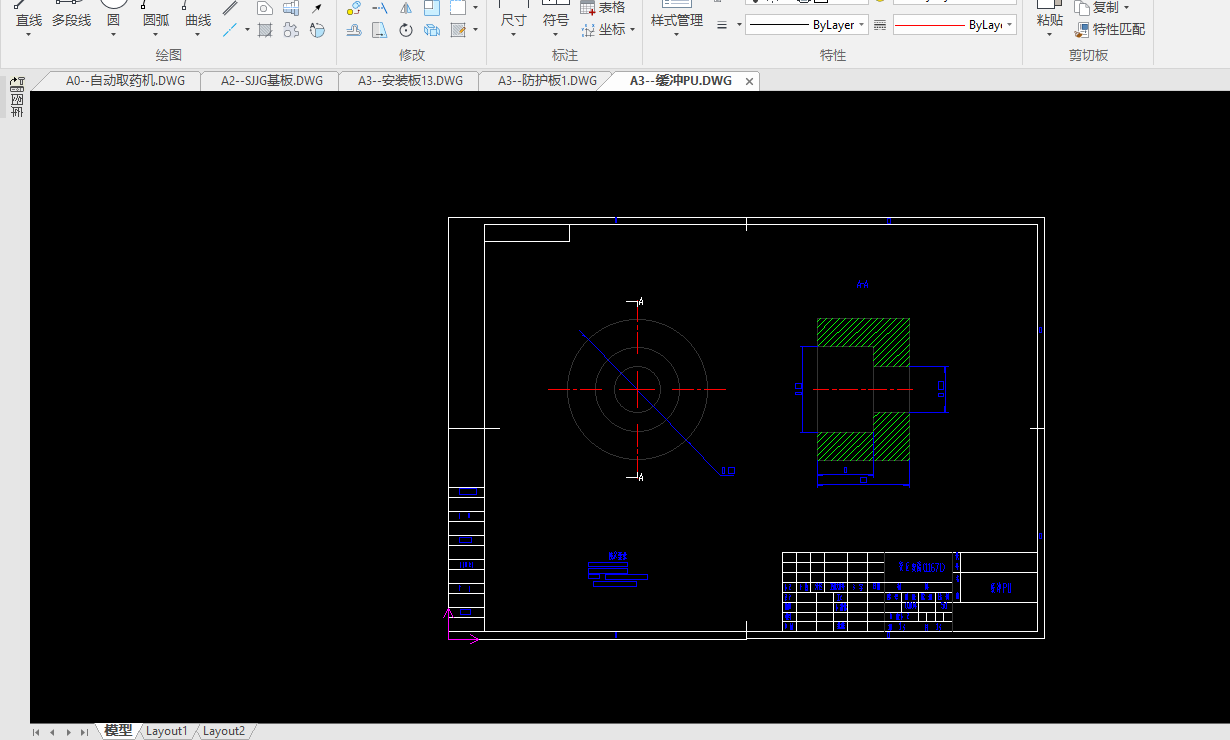
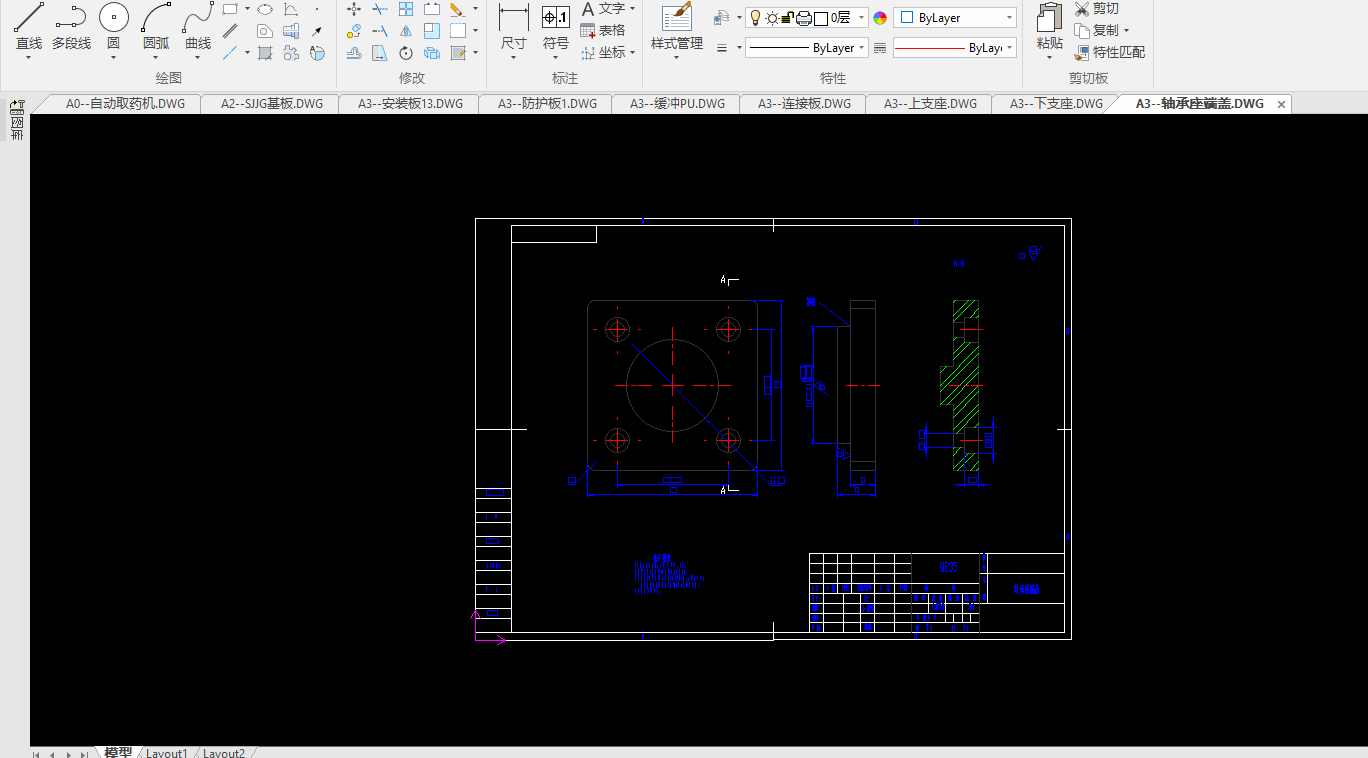
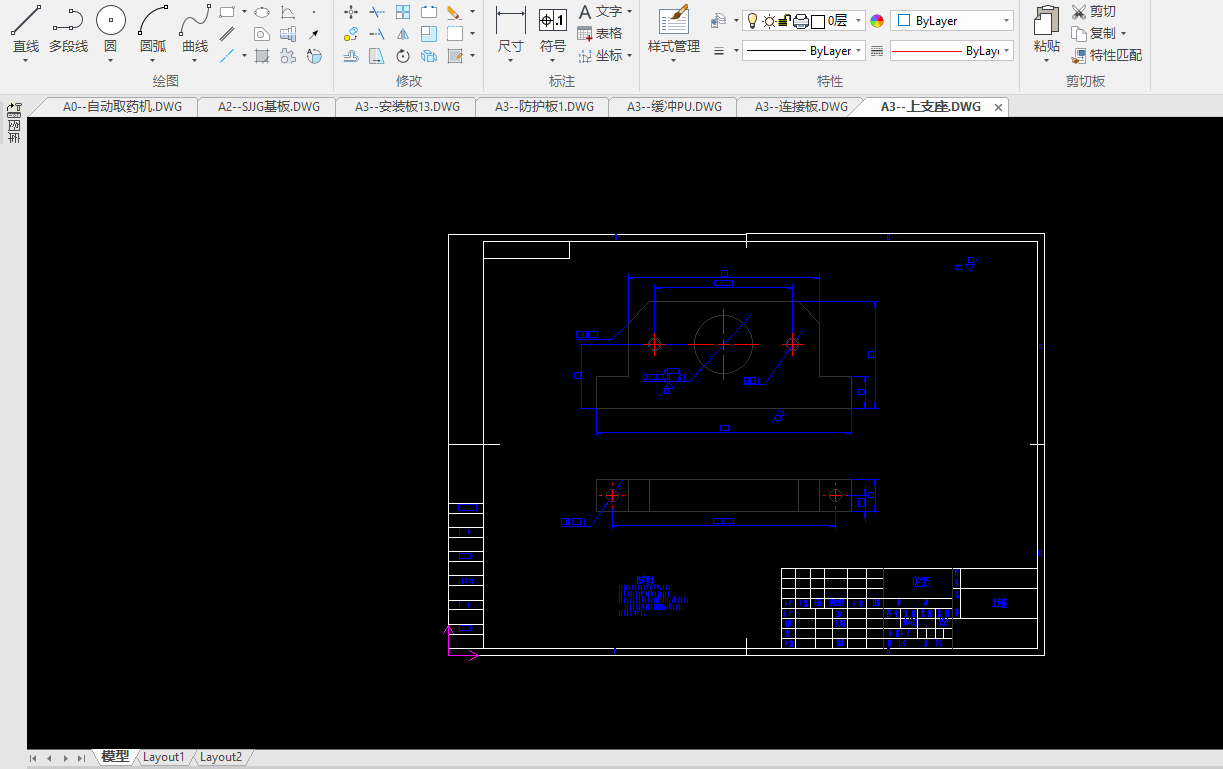
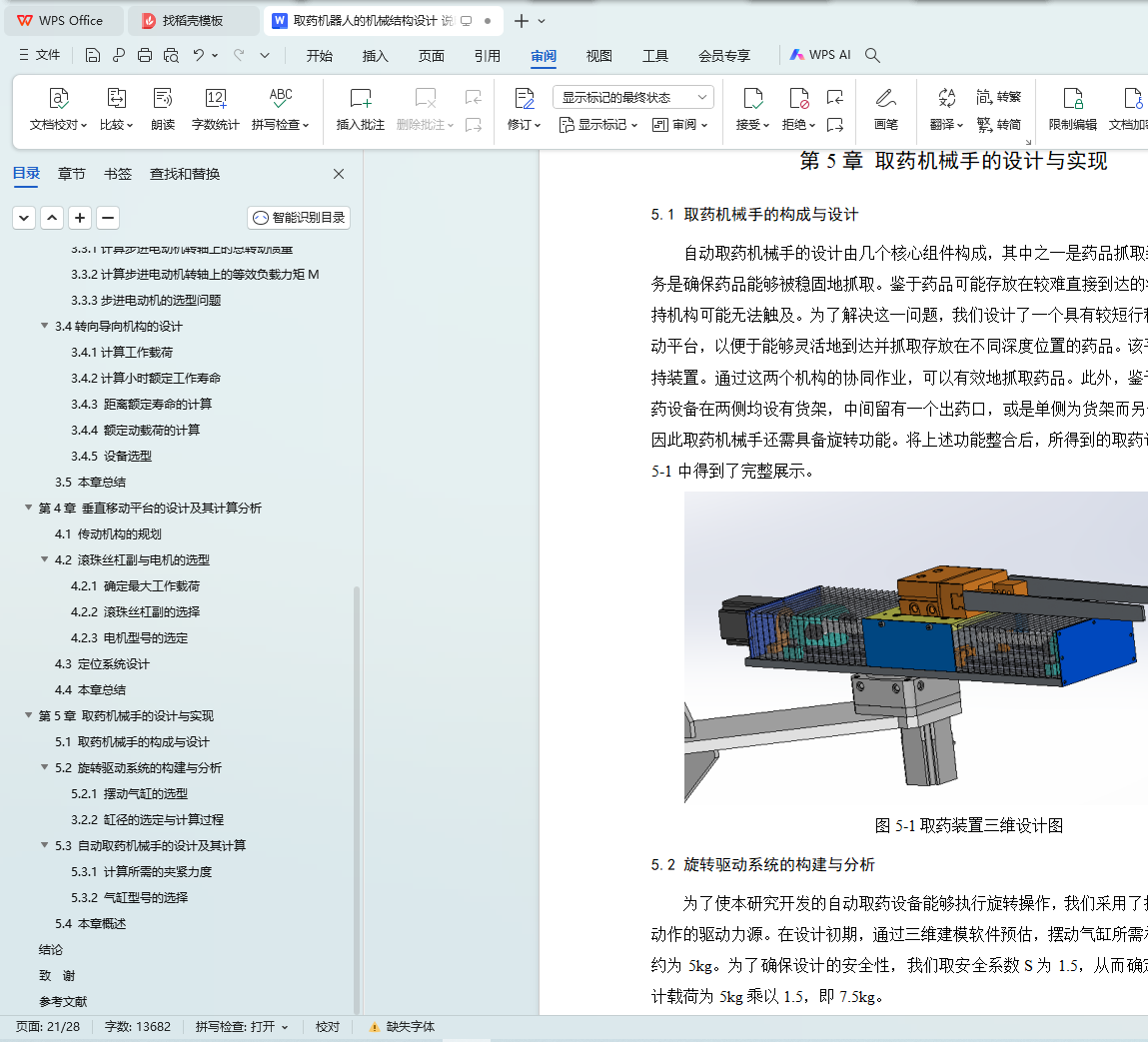
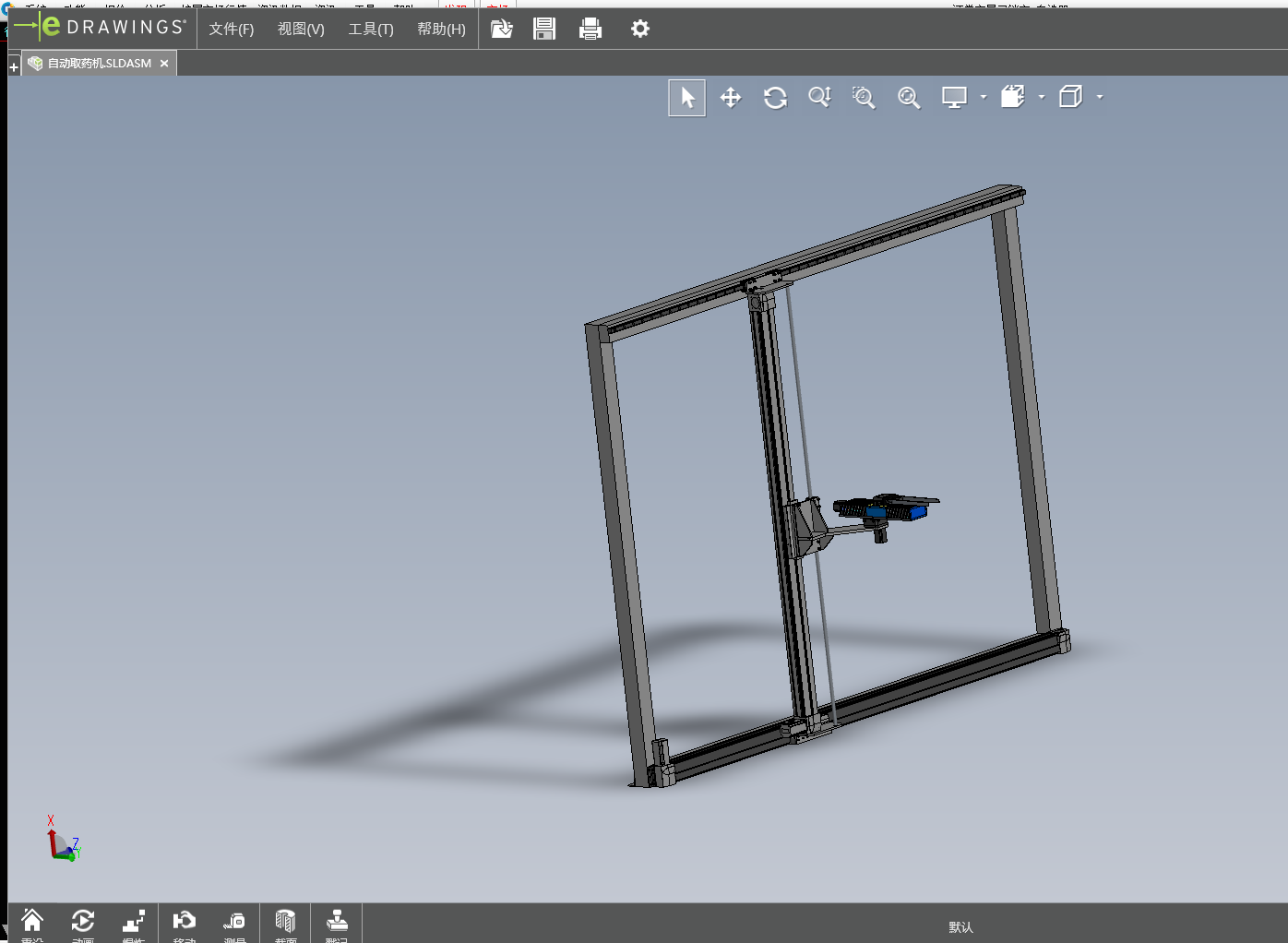
本研究课题将聚焦于药房自动化取药装置,旨在设计一款能够自动完成取药工作的机械手。在进行取药机器人的机械结构设计时,将深入探讨和分析机械手的取药动作,以确保对机械原理有透彻的理解。设计的核心在于明确机械手的运作方式,这包括但不限于其运动轨迹和操作模式。此外,将对驱动器和执行机构进行精心选择,以确保它们能够高效地协同工作,满足取药任务的特定需求。这一过程将涉及对不同组件性能的评估,以及对整个系统稳定性和可靠性的考量。利用Solidworks软件,对设计的机械手进行三维建模和组件装配,并在设计过程中不断进行调整和优化,以确保设计的合理性和实用性。
关键词:取药;机械手;取药机器人;机械结构设计;Solidworks
Abstract
As a country with a large population, coupled with the implementation of the family planning policy, the social structure of China is undergoing significant changes with the evolution of The Times, among which the phenomenon of population aging has increasingly become the focus of public attention. This was followed by a significant increase in medical demand, not only in the increase in the number of patients treated, but also in the increasing number of patients treated to manage chronic diseases. This led to a sharp increase in the workload in hospital pharmacies, and the storage, management and distribution of drugs were beyond the coping ability of some pharmacies, which brought great work pressure to pharmacists. To alleviate this situation, many hospitals began to adopt automated drug distribution devices, which not only improved the efficiency of drug distribution and reduced the work intensity of pharmacists, but also effectively reduced drug distribution errors due to fatigue operation.
This research topic will focus on the pharmacy automatic medicine collection device, aiming to design a manipulator that can automatically complete the medicine collection work. In the mechanical structure design of the robot, the medicine taking action of the manipulator will be explored and analyzed in depth to ensure a thorough understanding of the mechanical principles. The core of the design is to define how the manipulator operates, which includes but is not limited to its trajectory and mode of operation. Furthermore, the drives and actuators will be carefully selected to ensure that they can work together efficiently to meet the specific needs of the drug-taking task. This process will involve the evaluation of the performance of the different components and the stability and reliability of the entire system. Using Solidworks software, the designed manipulator is subjected to 3 D modeling and component assembly, and is constantly adjusted and optimized during the design process to ensure the rationality and practicality of the design.
Key words: medicine; manipulator; mechanical structure design; Solidworks