摘 要
本文旨在设计并实现一款基于STC89C51单片机的走迷宫机器人,该机器人集成了现代传感器技术、控制理论与路径规划算法,具备在迷宫环境中自主导航的能力。机器人通过集成红外探测器、超声波探测器等传感器,实时感知周围环境信息,构建迷宫地图。同时,运用高效的路径规划算法,根据地图数据计算出从起始点到目标点的最优路径,并能依据规划路径精准控制机器人的移动,顺利穿越迷宫。此外,机器人还具备跟踪、避障和红外遥控等功能,提高了其实用性和灵活性。在设计过程中,本文深入研究了物体避障、黑线红线走迷宫、红外遥控等关键技术,并采用了创新性的技术方法。通过调试检测,确保了各模块能输出正确的信号,实现了走迷宫机器人的各项功能。本研究不仅为智能机器人的设计与应用提供了新的思路,也为相关领域的研究提供了有价值的参考,具有广泛的现实意义和应用前景。
关键词:走迷宫机器人;STC89C51单片机;路径规划算法;传感器技术;避障
Abstract
This paper aims to design and realize a maze walking robot based on STC89C51 CM, which integrates modern sensor technology, control theory and path planning algorithm, and has the ability to navigate independently in the maze environment. By integrating infrared detectors, ultrasonic detectors and other sensors, the robot senses the information of the surrounding environment in real time and builds a maze map. At the same time, the efficient path planning algorithm is used to calculate the optimal path from the starting point to the target point according to the map data, and the movement of the robot can be accurately controlled according to the planned path to pass through the maze smoothly. In addition, the robot also has functions such as tracking, obstacle avoidance and infrared remote control, improving its practicality and flexibility. In the design process, this paper deeply studies the key technologies such as object obstacle avoidance, black line and red line maze walking, and infrared remote control, and adopts innovative technical methods. Through debugging and detection, it ensures that each module can output correct signals, and the functions of the maze walking robot are realized. This study not only provides new ideas for the design and application of intelligent robots, but also provides a valuable reference for research in related fields, with broad practical significance and application prospects.
Key words: maze walking robot; STC89C51 microcontroller; path planning algorithm; sensor technology; obstacle avoidance
目 录
摘 要
Abstract
第1章 绪论
1.1 选题背景及意义
1.1.1 选题背景
1.1.2 选题意义
1.2 国内外研究现状及发展趋势
1.2.1 国内研究现状
1.2.2 国外研究现状
1.2.3 发展趋势
1.3 本课题研究的主要内容
第2章 系统总体方案设计
2.1 设计要求
2.2 方案选择
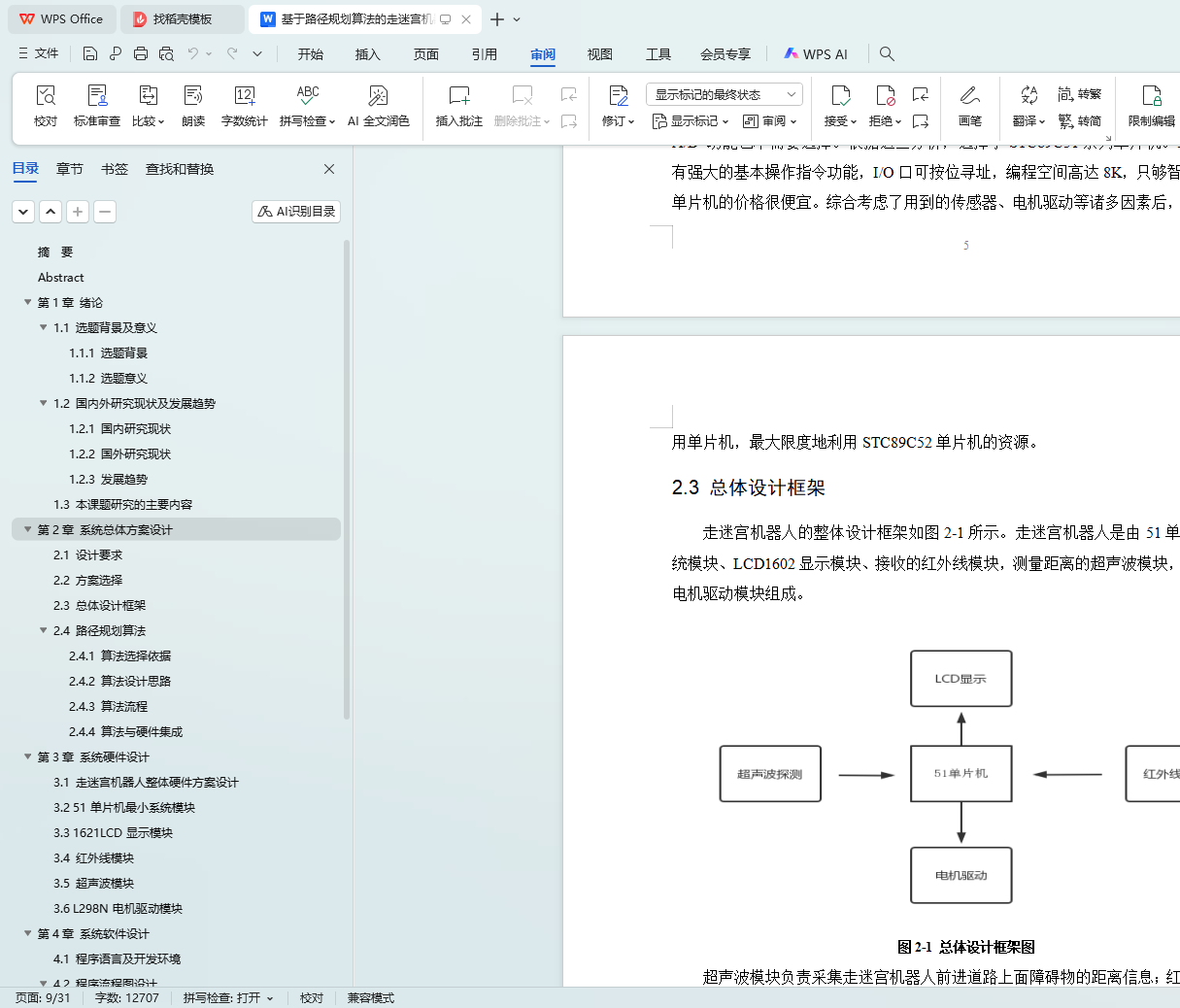
2.3 总体设计框架
2.4 路径规划算法
2.4.1 算法选择依据
2.4.2 算法设计思路
2.4.3 算法流程
2.4.4 算法与硬件集成
第3章 系统硬件设计
3.1 走迷宫机器人整体硬件方案设计
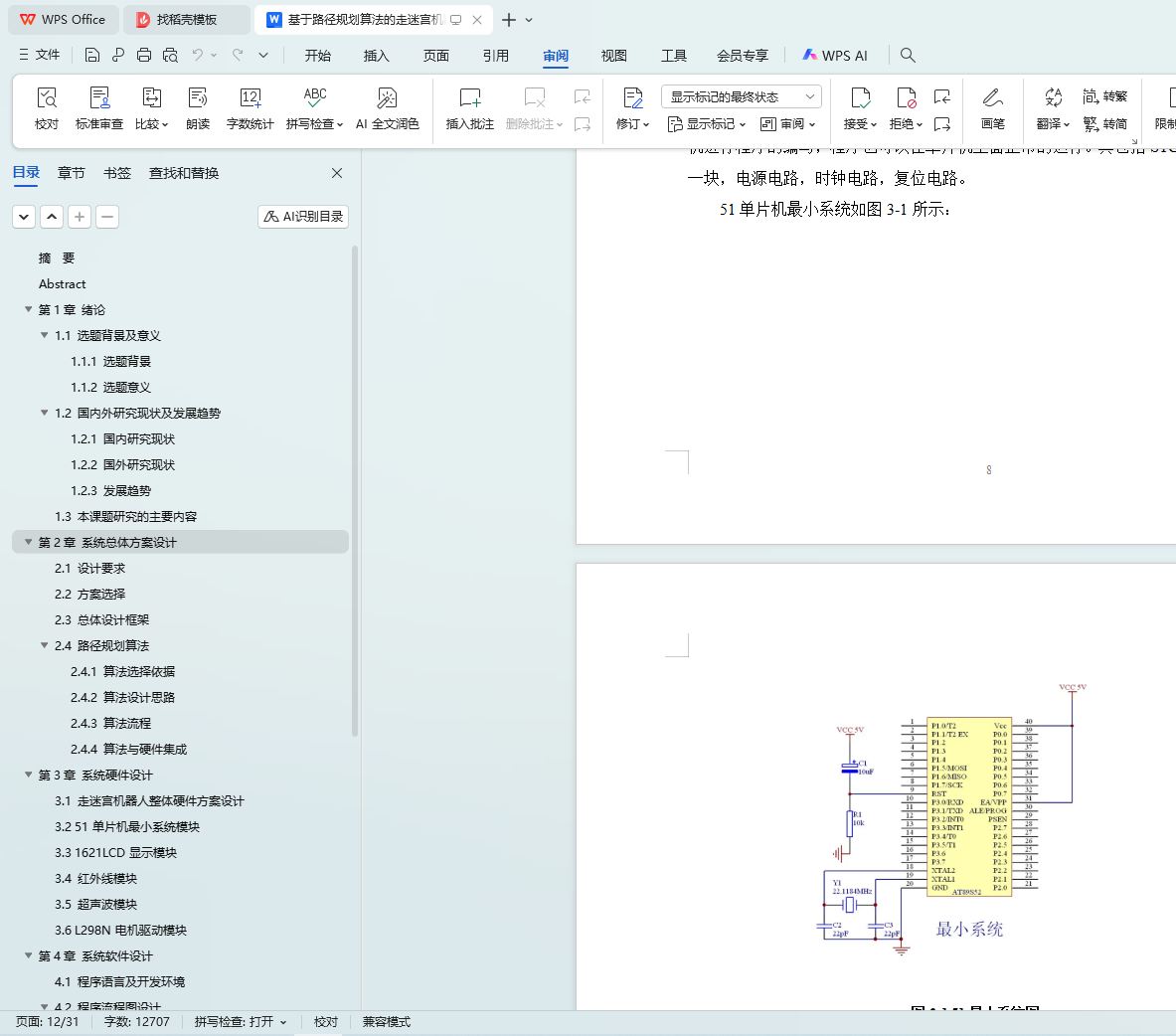
3.2 51单片机最小系统模块
3.3 1621LCD显示模块
3.4 红外线模块
3.5 超声波模块
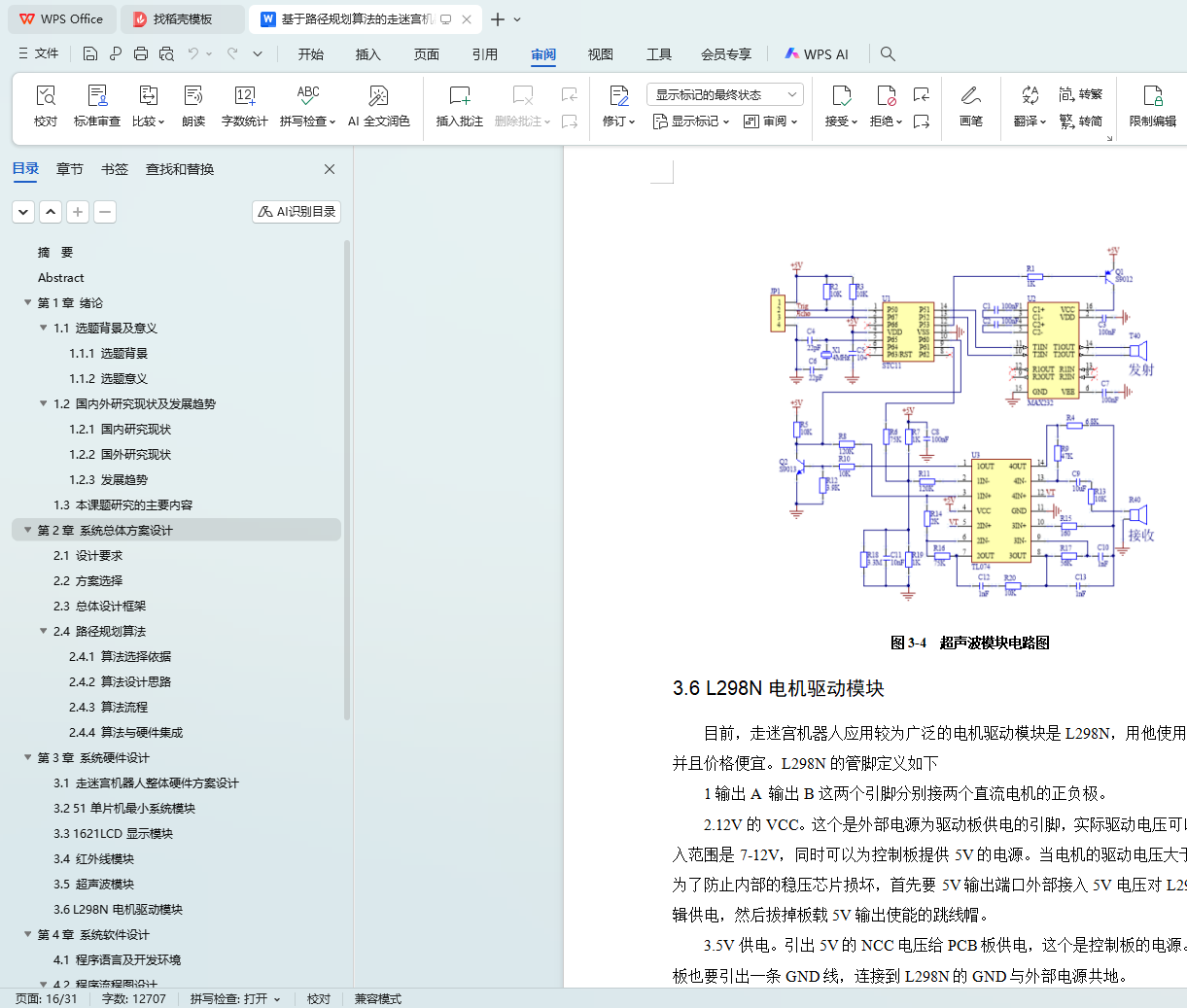
3.6 L298N电机驱动模块
第4章 系统软件设计
4.1 程序语言及开发环境
4.2 程序流程图设计
4.2.1 总体程序设计
4.2.2 LCD1602显示屏程序设计
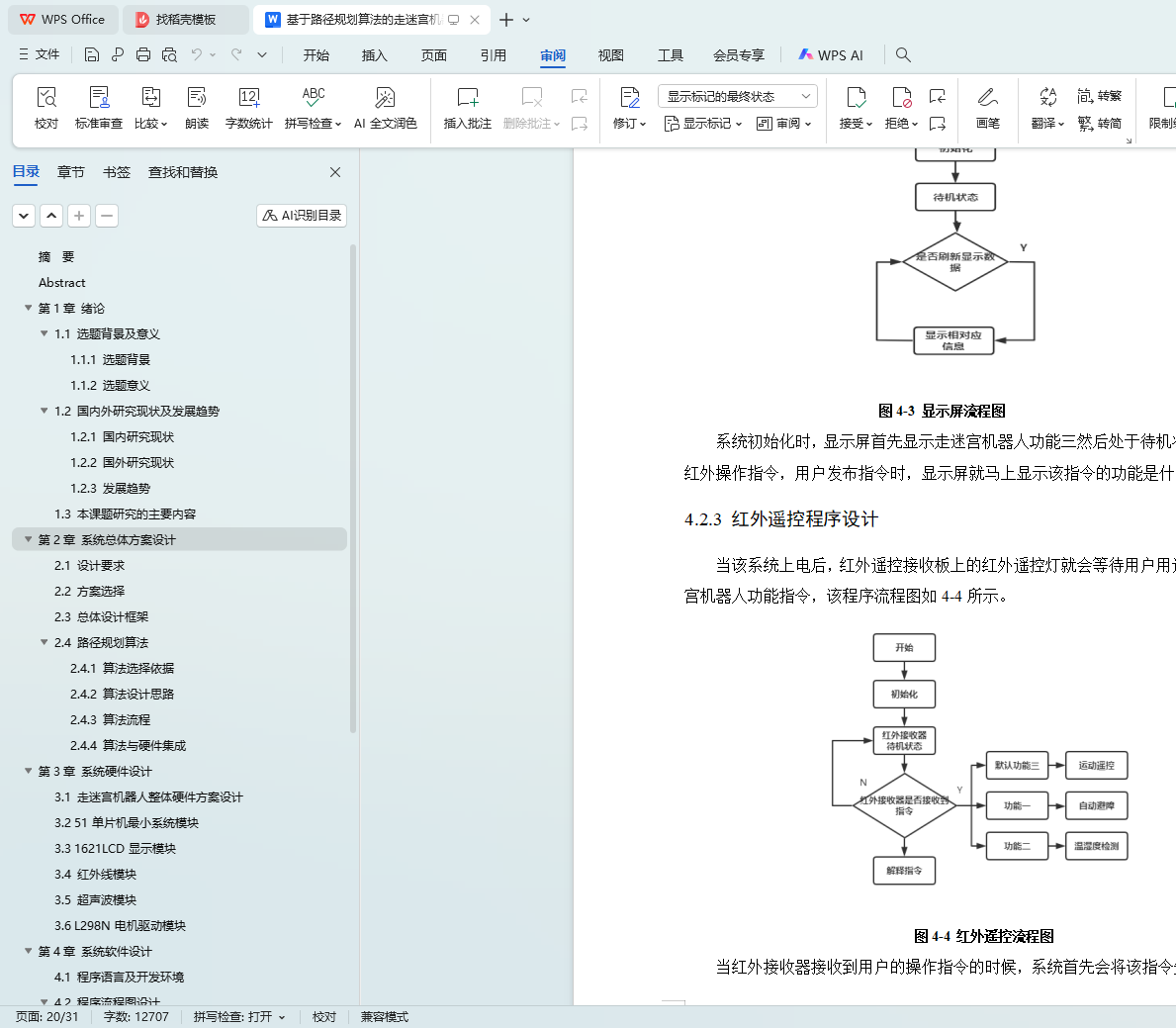
4.2.3 红外遥控程序设计
第5章 仿真设计
5.1 仿真环境与工具
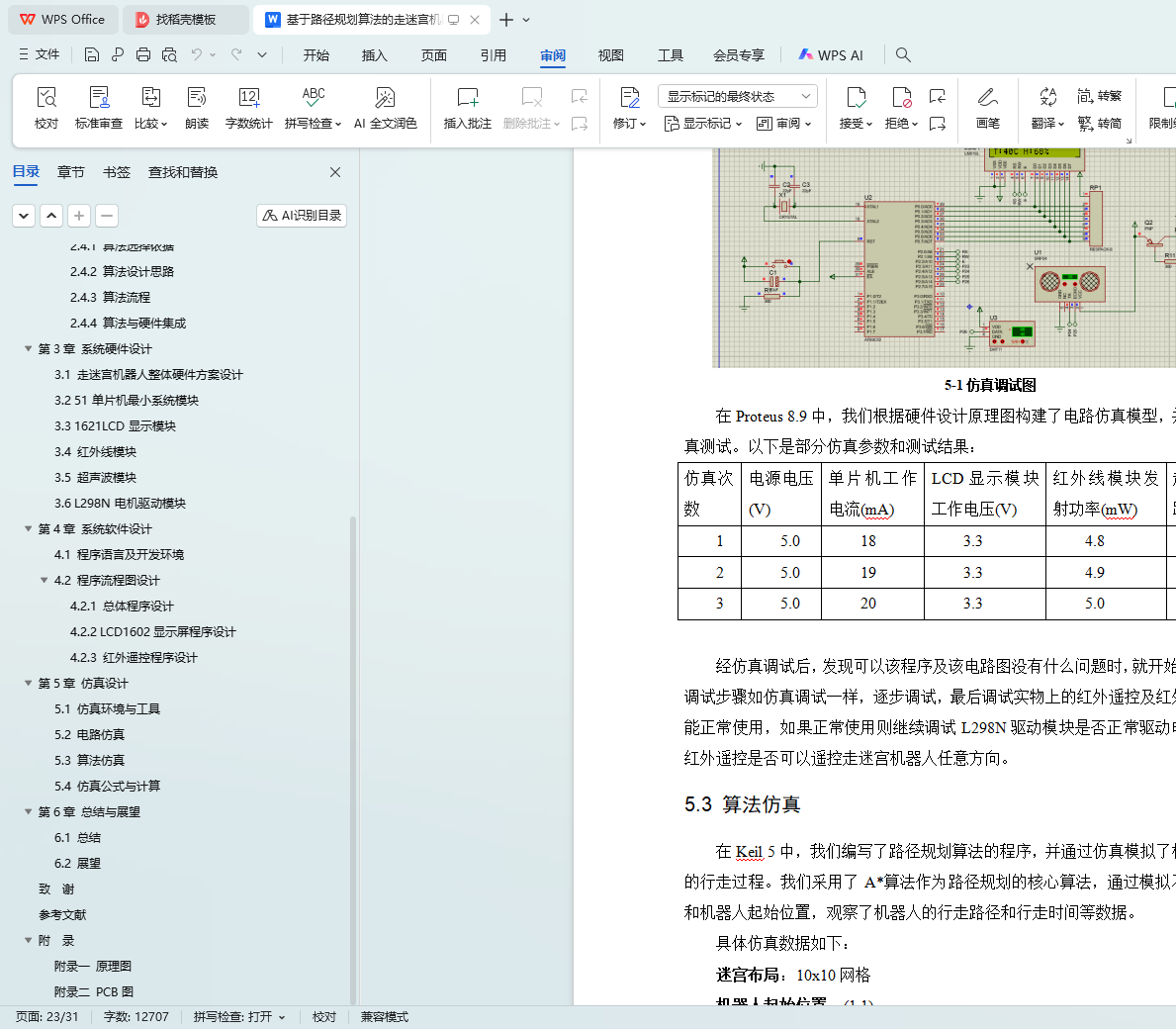
5.2 电路仿真
5.3 算法仿真
5.4 仿真公式与计算
第6章 总结与展望
6.1 总结
6.2 展望
致 谢
参考文献
附 录
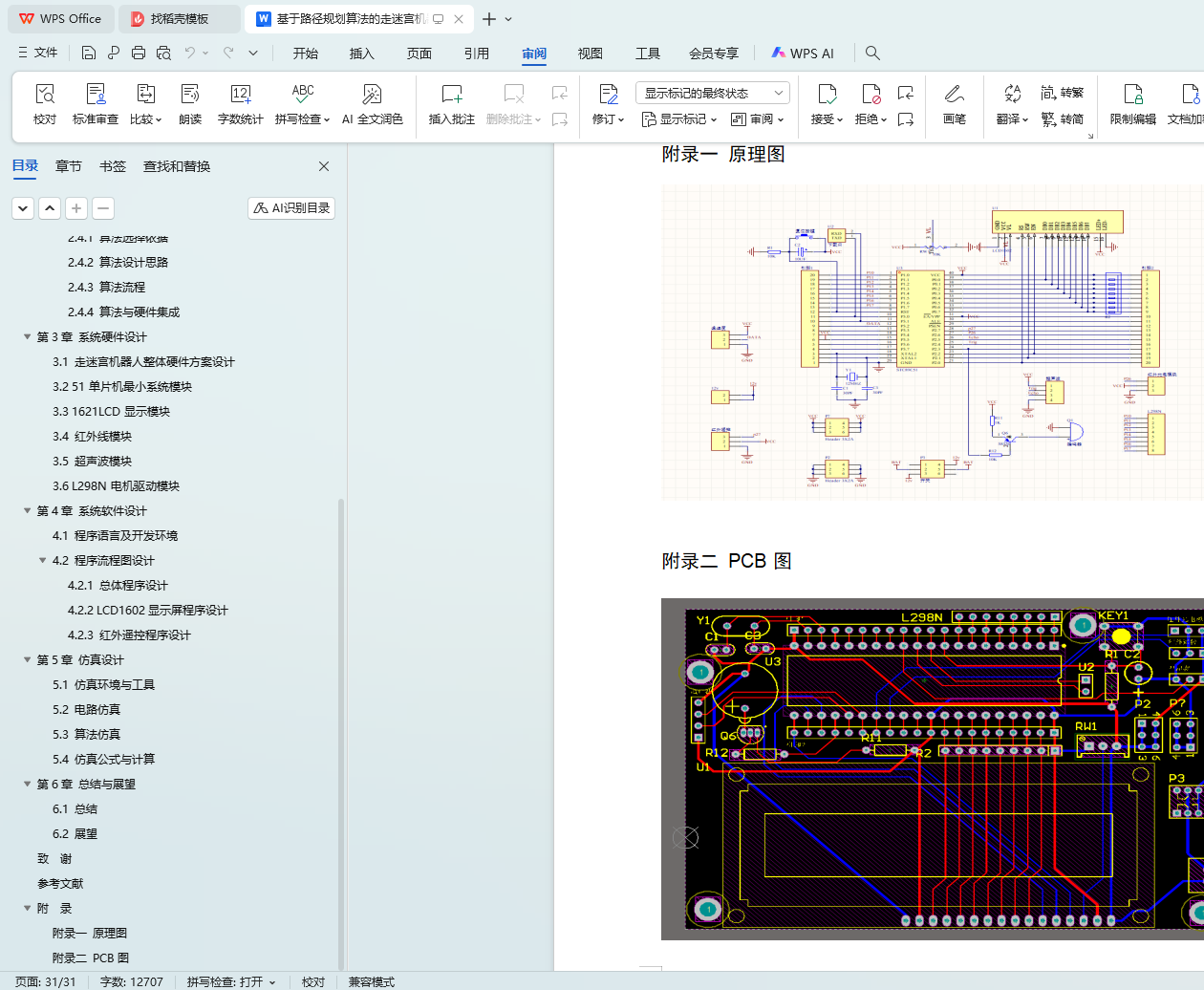
附录一 原理图
附录二 PCB图