ЫЎЙћВЩеЊзАжУбаОПЩшМЦ
еЊвЊ
ЫЎЙћВЩеЊзАжУЃЌАќРЈвЛИіЫЎЙмЁЂСйНќжеЕуЕФёюКЯЗНЪНвдМАЪЪКЯИНМўЕФЕФецПезАжУЁЃеТЗВПЗжАќРЈФкВПКЭЭтВПЫљЬсЙЉЕФЬзЙмЃЌФкВПЬзЙмдкФЉЖЫгавЛИіПЊЗХЪНЫЎЙћНгЪеЦїЃЌЫЎЙћНгЪеЦїЕФФкВПгавЛИіСщЛюЕФПЊЗХЪНЕФзЖаЮНгЪмВПЗжЁЃЯђФкЪеСВЕФзЖаЮВПЗжЕФзюаЁжБОЖДѓгке§дкЪеЛёЕФЙћЪЕЕФжБОЖЁЃвЛАыИеаддВжљШЁОігкДгФкаФШкКЯЕФдВзЖВПЗжКЭёюКЯзЖаЮвЛЖЫЛђЦфВПЗжЯђФкЪеСВЁЃЮќШыПЊПкЪЧбизХИеаддВжљВПЗжРяУцНгНќдВзЖаЮВПЗжЃЌзЖаЮВПЗжвЛАуСщЛюёюКЯИеаддВжљЕзВПаЮГЩПЊЗХЪНЫЎЙћНгЪеЁЃЕкЖўИіСщЛюзАжУаЮГЩвЛИіецПеЗтБеЮќШыЪНПЊПкЁЃЭтЬзЭВФкЬзЭВЙЬЖЈжсЯђМфОрЖдЕуСНВрЕФЮќШыЪНПЊПкДІРэРДЫЕвтЮЖзХЖЈвхвЛИіЖЫПкБЛАВХХдкЭтУцЕФЭтБкёюКЯЕФЙмЕРЁЃ
баЗЂБГОА
дкШеБОЃЌгЃЬвЫЎЙћЪЧвЊППШЫЙЄаЁаФЕФЪеЛёЕФЁЃгЩгкгЃЬвЫЎЙћЕФВЩеЊЦкКмЖЬЃЌВЩеЊЙЄзївЊМЏжадкЖЬЦкФкЭъГЩЃЌдйМгЩЯРЭЖЏСІЖЬШБЃЌетаЉЖМЯожЦСЫгЃЬвЫЎЙћЕФжжжВФЖЪ§ЁЃДЫЭтЃЌгЃЬвЫЎЙћЪїКмИпЃЌВЩеЊашвЊгУЕНЬнзгЁЃетЪЙЕУВЩеЊЙЄзїМШЮЃЯегжаЇТЪЕЭЁЃЮЊСЫНкдМРЭЖЏСІЃЌгЃЬвЫЎЙћЪеЛёЛњЦїШЫвдЪЕбщбаОПЮЊФПЕФЖјЩшМЦЃЌВЂЧвЦфГѕВНЪЕбщШЁЕУСЫГЩЙІЁЃЙћЪпЪеЛёЛњЦїШЫЕФЕїВщбаОПвбОШЁЕУСЫвЛЖЈЕФГЩЙІЁЃжЎЧАЗЂВМЕФЙћЪпЪеЛёЛњЦїШЫДѓЖрзАБИЕФЪЧЩугАЛњЃЌЫЎЙћЕФЭМЯёвЊЭЈЙ§гыБГОАЕФбеЩЋЧјБ№ЛђЬиЪтЕФЗДЩфБШВХФмБЛБцБ№ГіРДЃЛЫЎЙћЕФШ§ЮЌЖЈЮЛдђЭЈЙ§ЫЋФПСЂЬхЪгОѕЛђЪгОѕЗДРЁПижЦЯЕЭГЙРМЦЕУГіЁЃШ§ЮЌЪгОѕДЋИаЦїЕФгІгУвВгаЯрЙиБЈЕРЁЃетжжШ§ЮЌЪгОѕДЋИаЦїЕФгХЪЦдкгкЦфЭМЯёЕФИїИіЭМдЊЖМОпгаЦфМфОраХЯЂЁЃРћгУетвЛгХЕуЃЌФПБъЮяЬхФмЭЈЙ§ЦфШ§ЮЌаЮзДБЛШЯГіЁЃЖдгкгЃЬвЫЎЙћВЩеЊЙЄзїЖјбдЃЌетвЛЙІФмгааЇЕФЪЙЫЎЙћдкВЩеЊЙ§ГЬжаБмУтХізВЕНвЖзгЁЂОЅЕШеЯАЮяЁЃЮЊСЫГЩЙІЕФЭъГЩВЩеЊЖЏзїЃЌгааЇЕФБцБ№еЯАЮяКЭКьЩЋЕФГЩЪьЕФЙћЪЕЪЧжСЙиживЊЕФЁЃЮЊДЫЃЌШ§ЮЌЪгОѕЯЕЭГХфБИСЫСНИіМЄЙтЖўМЋЙмЁЃвЛИіЖўМЋЙмЗЂГіКьЩЋЕФЙтЯпЃЌСэвЛИіЗЂГіКьЭтЙтЪјЁЃЮЊСЫБмУтЬЋбєЙтЕФИЩШХЃЌЛњЦїШЫЪЙгУАыЕМЬхЮЛжУЙтУєДЋИаЦїРДЬНВтЗДЩфЙтЁЃАыЕМЬхЮЛжУЙтУєДЋИаЦїЕФаХКХзщМўНгЪеИпЦЕТЪЩСЫИЕФМЄЙтЙтЯпРДЧјЗжГіЬЋбєЙтЁЃМЄЙтЪјЩЈУшЕУГіБЛВтЮяЬхЕФШ§ЮЌФЃаЭЃЌВЂЭЈЙ§КьЙтКЭКьЭтЙтЯпМфЬиЖЈЕФЗДЩфЙтЕФЬиеїРДЧјБ№гкЦфЫћЮяЬхДгЖјЗжБцГіКьЩЋЕФЙћЪЕЁЃЛњЦїШЫашвЊдкЙћдАИїжжЛЗОГЃЈЮТЖШЁЂШеееЕШЃЉжазМШЗЁЂИпаЇЕиЃЌдкВЛЦЦЛЕЙћЪЕКЭЙћЪїжІбОЕФЧщПіЯТНјааВЩеЊШЮЮёЁЃгЃЬвЫЎЙћЪїДѓЖржжжВЖргъЕиЧјЃЌашжжжВдкДѓХяФкРДзшЕВгъЫЎЁЃЛњЦїШЫдкДѓХяРяЙЄзїЃЌВЛашвЊБЉТЖдкЗчгъжаЁЃ гЃЬвЫЎЙћВЛТлдкЯЪЙћЪаГЁЛЙЪЧгУгкМгЙЄЖМБиаыСЌгЃЬвЫЎЙћЙЃвЛЦ№ВЩеЊЁЃОЭШЫЙЄВЩеЊРДЫЕЃЌХЉУёУЧгУЪжжИзЅзЁгЃЬвЫЎЙћЙЃЩЯВПНЋЦфЯђЩЯЬсЦ№ДгЪїЩЯеЊЯТЁЃвђЮЊетИіРэгЩЃЌЩшМЦВЂНјааЪЕбщЪЙЛњЦїШЫРДЯёХЉУёвЛбљзЅзЁгЃЬвЫЎЙћЙЃЕФЩЯВПВЂНЋЦфЯђЩЯЬсЦ№ДгЪїЩЯеЊЯТЁЃ
БОЗЂУїЭЈГЃЩцМАЕНвЛжжЪеМЏЫЎЙћКЭМсЙћЕФИФНјзАжУЃЌЦфжаецПеВПЗжЁЂёюКЯСЫвЛИіСщЛюЕФеТЗвВОЭЪЧЫЕДгЪїЩЯеЊГ§ЙћзгЃЌШЛКѓДцЗХЕНЪеМЏзАжУжаЁЃБОвЧЦїЕФЗЂУїРћгУецПезїЮЊЖЏСІЕФРДдДЃЌРћгУИУзАжУВЩеЊЫЎЙћЗЧГЃЧсЫЩЁЃ
ВЩеЊЫЎЙћЃЌАќРЈЫЎЙћМАМсЙћЃЌОГЃашвЊРћгУЛњаЕММЪѕЃЌетНЋДњЬцИіШЫгУЪжДгЪїЩЯВЩеЊЕФашвЊЁЃЖдгкФГаЉЫЎЙћЃЌЪжВЩЭЈГЃЪЧЮЊСЫШУБмУтВЩЕНгашІДУЕФЫЎЙћЁЃЕБШЛЃЌетбљЕФЪжВЩЗНЪНЛЈЗбИпЃЌЫйЖШТ§ЃЌЖјЧветаЉИпГЩБОЖМЛсзЊМоИјЫЎЙћЯћЗбепЁЃ
дкЙ§ШЅЃЌИїжжВЛЭЌЕФЫЎЙћВЩеЊЗНЗЈвбОБЛгІгУЃЌШЛЖјетаЉзАжУЭЈГЃЪЙгУИДдгЕФЛњЕчЩшБИАќРЈЙшЙтЕчГиДЋИаЦїКЭЯёЖЈЮЛЫЎЙћЮЛжУЕФЛњаЕЪжБлРДВЩеЊЫЎЙћЁЃетаЉзАжУдкЬсИпВЩеЊаЇТЪЕФЭЌЪБВЛПЩБмУтЕФдіМгСЫЩЫКІаТЯЪЫЎЙћЕФЗчЯеЁЃ
ШЛЖјЃЌИљОнБОЗЂУїПЩвдНЋВЩеЊЩЫКІЙћЪЕЕФЗчЯеНЕЕНзюЕЭвдМАУЛгаБивЊРыПЊЕиУцвЛИіЙЄШЫОЭФмЭъГЩВЩеЊЁЃИУЩшБИМђЕЅЃЌжиСПЧсЃЌПЩвдДгЕиУцЭЈЙ§вЛИіКЯЪЪЕФбгЩьАєЛђепРрЫЦЕФЖЋЮїДІРэЁЃ
БОЗЂУїИХвЊ
вђДЫЃЌБОЗЂУїЬсЙЉСЫвЛжжИФНјЕФЫЎЙћЪеМЏВЩеЊзАжУЃЌетжжЩшМЦЕФзАжУПЩвдНЋЫЎЙћЛђМсЙћЧсЧсЕФДгЪїЩЯВЩеЊЯТРДЁЃ
ЫќЪЧвЛИіНјвЛВНИФНјСЫЕФВЩеЊЫЎЙћКЭМсЙћЕФзАжУЃЌДЫЩшБИЕФВйзїМАЙЉЕчЖМгЩвЛИіМђЕЅЕФецПедДЬсЙЉЁЃЫќвВЖдЯжгаВЩеЊЫЎЙћзАжУНјааСЫвЛжжИФНјЃЌРћгУСЫУЛгаЛњаЕдЫЖЏВПМўЕФНсЙЙЁЃЦфЫќЕФзАжУвдМАБОЗЂУїНЋНјвЛВНЯдЯждкЖдвеЪѕЕФбаОПМАЯТСаЙцИёЁЂИНМгвЊЧѓМАЯргІЕФЭМжНЩЯЁЃ
ЛцЭММђНщ
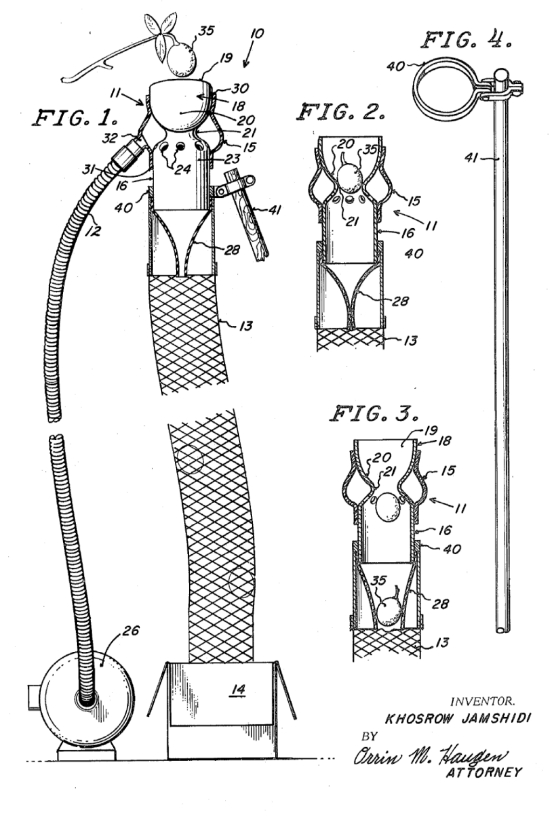
ЭМ1ЪЧвЛИіећЬхЪгЭМЃЌЫЕУїСЫВПЗждРэМАЫЎЙћМсЙћЪеМЏзАжУЃЌВЂЫЕУївЧЦїгавЛЬѕГЄЗНаЮЫЎЙћДЋЪфЙмЕРЬсЙЉВЩеЊЕФЪеМЏзАжУЁЃ
ЭМ2ЪЧвЛИіЯИНкЭМЃЌЯдЪОСЫВПЗжНиЭМЃЌЫЕУїСЫДгЪїЩЯВЩеЊЫЎЙћЕФзАжУЕФНсЙЙЁЃ
ЭМ3РрЫЦгкЭМ2ЃЌЫЕУїСЫВЩеЊЕЅИіЙћЪЕЭЈЙ§ВЩеЊЦїЭЗВПНсЙЙЕФЙ§ГЬЁЃ
ЭМ4ЪЧвЛИіЭЗВПЪдЭМЃЌЫЕУїСЫВЩеЊЦїЭЗВПбгЩьАєЕФПЩЪЭЗХСЌНгЗНЪНЁЃ
Ш§ЮЌЪгОѕДЋИаЦїЩЯзАБИСЫвЛИіЗЂЙтЦїЁЂвЛИіЙтЕчЬНВтЦїКЭвЛИіЩЈУшзАжУЃЈЭМ3ЃЉЁЃЗЂЙтЦїгЩвЛИіКьЭтЯпМЄЙтЦїзщМўЁЂКьЩЋМЄЙтзщМўЁЂвЛИіРфЦЌЁЂвЛИіАыЗДЩфОЕКЭСНИіЗДЩфОЕЙЙГЩЁЃЙтЕчЬНВтЦїгаСНИіАыЕМЬхЮЛжУЙтУєДЋИаЦїЁЂвЛИіОЕЭЗКЭвЛИігУгкМѕЩйбєЙтгАЯьЕФКьЩЋТЫЙтЦїЙЙГЩЁЃЩЈУшзАжУгЩвЛИіЕчСїМЦЙтЕчЩЈУшзАжУКЭвЛИіВННјЕчЛњЙЙГЩЁЃЕчСїМЦЙтЕчЩЈУшзАжУЪњжБЩЈУшЮяЬхЃЌВННјЕчЛњЫЎЦНЩЈУшЮяЬхЁЃКьЩЋКЭКьЭтЯпМЄЙтЪјЭЈЙ§РфЦЌМЏжадкЭЌвЛЗЂЩфКЭе§УцЗДЩфЙтжсЁЃЙтЯпдкдЖДІЭЈЙ§АыЗДЩфОЕБЛЗжЮЊСНЙЩЃЈУПвЛЙЩЖМШдАќКЌСНжжЙтЕФВЈГЄЃЉЁЃетСНЙЩЙтЭЌЪБЩЈУшЮяЬхЁЃДгБЛЩЈУшЮяЬхЩЯЗДЩфЕФСНЙЩЙтЯпОлНЙдкСНИіАыЕМЬхЮЛжУЙтУєДЋИаЦїЩЯЁЃШ§ЮЌЪгОѕДЋИаЦїгыБЛЩЈУшЮяЬхЕФОрРыПЩРћгУАыЕМЬхЮЛжУЙтУєДЋИаЦїМьВтЕНЕФЗЕЛиЕчСїКЭСНЙтЪјЕФЕчСїМфЕФБШТЪЭЈЙ§Ш§НЧаЮЗЈБЛМЦЫуГіРДЁЃМЄЙтЪјЗЂГіЩСЫИЕФаХКХРДЯћГ§ЬЋбєЙтЖдНсЙћЕФгАЯьЁЃгУетжжЗНЗЈЃЌЗДЩфЙтЛсДгЬЋбєЙтжаЗжРыГіРДЃЌаЮГЩСЌајЕФЙтЁЃ
ВЈГЄЮЊ700-1000nmЕФКьЭтЙтФмдкгЃЬвЫЎЙћЪїЕФШЮвтВПЗжСМКУЗДЩфЁЃСэвЛЗНУцЃЌВЈГЄЮЊ690nmКьЩЋЙтЯпВЛФмБЛЮДГЩЪьЕФЙћЪЕЁЂвЖзгКЭОЅИбСМКУЗДЩфЖјФмБЛКьЩЋЕФГЩЪьгЃЬвЫЎЙћСМКУЗДЩфЁЃбаОПжаБэУїЃЌВЈГЄЮЊ830nmЕФКьЭтЙтКЭВЈГЄЮЊ690nmЕФКьЙтЪЧзюКЯЪЪЕФЁЃКьЭтМЄЙт(830nm)ВтСПДгШ§ЮЌЪгОѕДЋИаЦїЗЕЛиЕФгЃЬвЫЎЙћЪїУПвЛВПЗжЕФОрРы,КьЩЋМЄЙт(690nm)МьВтПЩЪеЛёЕФКьЩЋГЩЪьЙћЪЕЁЃ
ШчЩЯЫљЪі,МЄЙтЙтЪјЗжГЩСНЙЩЙтЯпЁЃШ§ЮЌЪгОѕДЋИаЦїЭЌЪБЩЈУшетСНЪјЙтЯп,СНИіЯёЫиЕуЭЌЪБВтСПвдЬсИпЩЈУшЫйЖШЁЃЦфЯёЫиЮЊ50,000ЃЈДЙжБЗНЯђ250ЃЌЫЎЦНЗНЯђ200ЃЉЁЃЦфЩЈУшЪБМфЪЧ1.5УыЁЃЪгвАЮЊДЙжБЗНЯђ43.8ЁуКЭЫЎЦНЗНЯђ40.6◦ЁЃДЋИаЦїЕФгааЇЗЖЮЇЪЧ170mmЕН 500mmЁЃ ШчЙћЖдЯѓРыДЋИаЦїЙ§дЖ,МьВтЙтБЛЯїШѕ,ЮоЗЈВтЕУОЋШЗЕФЪ§ОнЁЃ
МЄЙтЪјУПДЮБЛЗДЩфЕФЙтБЛСНИіАыЕМЬхЮЛжУЙтУєДЋИаЦїНгЪеМьВтЁЃКьЙтКЭКьЭтаХКХДгАыЕМЬхЮЛжУЙтУєДЋИаЦїЗЂГіЕФЁЃЗжБ№НгЪеКьЩЋКЭКьЭтаХКХ,КьЩЋКЭКьЭтМЄЙтЙтдДЗЂГіЦЕТЪ41.6kHzЁЂЯрЮЛвЦЮЊ90◦ЕФЩСЫИЙтЯпЁЃАыЕМЬхЮЛжУЙтУєДЋИаЦїЗЂГЕЕФЙтЕчЕчСїБЛЗХДѓЁЃКьЙтКЭКьЭтЙтЕФаХКХБЛЗХДѓЦїЫјЖЈЃЌЗжБ№МьВтЃЌвВФмЙЛЯћГ§ЛЗОГЙтЯпЕФгАЯьЁЃШ§ЮЌЪгОѕДЋИаЦїПЩдкМДЪЙЮЊ100 klxееЖШЕФбєЙтЯТЪЙгУЁЃвЛИіКьЩЋЕФЯёКЭвЛИіКьЭтЙтЕФЯёБЛЙЉгІИјМЦЫуЛњ,ШЛКѓМЦЫуЛњЛёЕУвЛЯЕСаЭМЯёгыЯИЗжЭМЯёЁЃвЛЯЕСаЕФЭМЯёЭЈЙ§АыЕМЬхЮЛжУЙтУєДЋИаЦїЕФбєМЋAКЭBЗДРЁЕФКьЭтаХКХгУШ§НЧаЮЗЈЕФБЛМЦЫуЩњГЩЁЃЯИЗжЭМЯёДгКьЙтКЭКьЭтаХКХжЎМфЕФБШР§ЕУЕНЁЃКьЩЋгЃЬвЫЎЙћЭЈЙ§КьЩЋМЄЙтЕФЗДЩфТЪЧјБ№гкЪївЖЕШЦфЫћЮяЬхЁЃШЛЖј,ЪїЕФжїИЩвдМАКьЩЋЕФЙћЪЕЖМЗДЩфКьЩЋМЄЙтЪјЁЃвђДЫ,ашвЊЪЙгУЦфЫћЗНЪНЧјБ№ЙћЪЕгыЦфЫћЮяЬхЁЃЖјЕБЫЎЙћБЛОЕУцЗДЩфКѓЃЌЕБЫћУЧБЛЩЈУш,ЙћЪЕжааФФмСМКУЪЧЗДЩфМЄЙтЙтЪјЁЃШЛЖј,етжжЯжЯѓВЛЗЂЩњдкЪїИЩЕФБэУцЁЃЪЙгУетжжЗДЩфЯжЯѓУПИіЙћЪЕЕФжааФНЋБЛШЯГіЁЃЕБШ§ЮЌЪгОѕДЋИаЦїПЩМћЙћЪЕЕФжааФЃЌЙћЪЕПЩвдгУетжжЗНЗЈБЛШЯГіЁЃЖдетаЉЭМЯёНјааДІРэ,КьЩЋЙћЪЕЮЛжУКЭЪївЖКЭЪїжІЕШеЯАЮяЖМПЩБЛБцШЯГіЁЃ
ЭМ4ЫљЪОЮЊЫљЕУЭМЯёЕФР§згЁЃвЛЯЕСаЕФЭМЯёЭЈЙ§Ш§НЧВтСПЗЈМЦЫуАыЕМЬхЮЛжУЙтУєДЋИаЦїжаЕФКьЭтаХКХЕУЕНЁЃДІРэКьЭтаХКХЁЂКьЙтаХКХКЭвЛЯЕСаЭМЯё,БЛЩЈУшЮяЬхБЛЛЎЗжЮЊКьЩЋЙћЪЕКЭЦфЫћЮяЬхЁЃгвЭМЫљЪОЯИЗжКѓЯдЪОЕФЭМЯёЁЃ
гХбЁЕФОпЬхЛЏУшЪі
е§дкПДЕФЪгЭМ1ЫљжИЖЈЕФВЩеЊзАжУЭЈГЃЩшМЦГЩ10ЫљЪОбљЪНЃЌетАќРЈЩшМЦГЩ11ЕФВЩеЊЭЗзщМўЃЌВЩеЊЭЗБЛМгЩЯвЛИіЕМЙм12,вдМАЫЎЙћЕФЕМЯђеТЗ13ЁЃЪеМЏзАжУЕФаЮЪНЪЧвЛИіКазгОЭЯё14ЫљЪОЕФбљзгЁЃ
дкетРяЮвУЧвЊЬиБ№жЎДІВЩеЊЭЗ11ЃЌИУНсЙЙАќРЈвЛИіеТЗЃЌгжвЛЖдЭЌжсАкЗХЕФЬзЭВЫљзщГЩЃЌАќРЈЭтВПЙмЕР15вдМАФкВПЬзЭВ16ЁЃФкВПзщзАЕФЬзЭВ16АќРЈЯё18ФЧбљЯдЪОЕФеТЗЃЌетИіеТЗдк19ДІгавЛИіПЊЗХЪНЫЎЙћНгЪеЦїЃЌЖјЧвдк20ДІОлКЯСЫвЛИізЖаЮВПЗжЁЃФкВПОлКЯзЖаЮВПЗж20гавЛИізюаЁжБОЖЛђЪеЫѕУцЛ§дк21ДІЃЌетИіжБОЖгыЪеЛёЕФЫЎЙћЕФжБОЖДѓжТЯрЕШЁЃвЛАуРДЫЕЃЌетжжЪеЫѕВПМўгЩШсадВФжЪЙЙГЩЃЌЪЙецПеЪБЫќЕФЪеЫѕжБОЖЪЧПЩЕїЕФЃЌетИіжБОЖЯрЖдгкИеЪеЛёЕФЫЎЙћЕФжБОЖРДЫЕВЛЛсИќДѓЁЃ
вЛАуЕФИеаддВжљМў23АВХХдквРППЙиЯЕФкВПзЖаЮВПМў20ДІЃЌдВжљМў23гаЖрИіЮќШыЪНПЊПк24ЗжВМдкЦфжмБпЁЃетаЉПЊПкФмЙЛЪЪгІдЪаэСїЖЏПеЦјЭЈЙ§ЃЌетСїЖЏЪЧгЩецПеВйзїЫљВњЩњОЭЯё26ЫљЯдЪОЕФФЧбљЁЃДгжаЮвУЧПЩвдПДЕНВЩеЊЭЗЃЌСэвЛИіШсадВПЗжЃЌзюКУЪЧвЛИізЖаЮВПЗжЃЌОЭЯё28ЫљЪОЃЌетИіВПЗжБЛСЌНгЕНИеаддВжљЕзВПЖдСЂЕФдВзЖВПЗжРяУцЁЃ28ВПЗжЛсАВХХдкздааЙиБеКѓЃЌШчЙћашвЊЕФЛАОЭЯёЭМ2ЫљЪОФЧбљЁЃЖдгкДѓЖрЪ§гУЭОЃЌВПМў28ПЩжЦзїШсШэЕФОлввЯЉЃЌбЙСІЮЊЕМЯђЕФОлЖдБНЖўМзЫсввЖўДМѕЅЃЌЛђШчШсадБЁФЄЮяжЪЁЃ
МЬајЙизЂЭМ1ЃЌЮвУЧНЋПДЕНЬзЭВ15ЕжбКДІжУЮќЦјПЊПк24СНВржсЯђМфИєЕФЬзЭВ16.етаЉУмЗтЧјгђГіЯждк30КЭ31ЁЃЭЌЪБЃЌвтЮЖзХЖЈвхвЛИіЬзЭВБк15БЛАВХХдк32ЩЯЕФВПМўЃЌетаЉВПЗждкВЩеЊЭЗ11ДІБЛАВХХСЫвЛЖдЬзЙм12ЁЃ
ЯждкЮвУЧАбзЂвтСІзЊЯђЯдЪОЫЎЙћ35ЕФЭМ2ЃЌетЗљЭМЯдЪОвЛИіЫЎЙћИеИеНјШы20етИіПЊЗХЪНФкВПОлКЯзЖаЮеТЗВПЗжЃЌЫЎЙћЕФжмГЄЛђБэУцЛ§НгДЅЧјгђШчЭМЫљЪОдк21ДІЁЃЕБЛцжЦЕФЫЎЙћдкФкВПЭЈЙ§ДЫЯЕЭГЪБЃЌецПжВПЗж26ЕФЛцжЦЛђЮќШыНсЙЙдк28ДІЧїНќгкЙиБеЁЃЭЈЙ§СЫПЊЗХЪНЪеЫѕВПЗж21ЃЌЫЎЙћНЋЛсЕєШыШчЭМ3ЫљЪОЕФВЩеЊЭЗжаЁЃ
вђДЫПЊЗХЪНВПМў28ПЩвдЪЪгІМфаЊадЕФДђПЊКЭЙиБеРДЛигІЛцжЦЕФецПеНсЙЙЃЌВЂЛигІзшШћеТЗЕФЪмЯожЦЧјгђ21ЁЃетжжзшШћЗЂЩњЪБЃЌЫЎЙћЕФТЗОЖЪЧдкФПЧАЕФеТЗЧјгђЁЃ
ЮЊСЫЛКНтУПИіЫЎЙћДгВХЛсдкЭЗВПЕєШыЪеМЏЯфЕФГхЛїЃЌЫЎЙћЕМЯђЬзЙм13БЛгУзїПижЦЫЎЙћЧсШсЕиДцШыЪеМЏЯфБШШчЫЕЯё14ЫљЪОзАжУЁЃетжжЗНЪНПЩвдУтГ§ЫЎЙћЪеМЏЪБЩЫКІЕНЫќЕФБэЦЄЛђепЙћШтЁЃ
ЯждкПДЭМ4ЃЌЫќЕФВЩеЊЭЗ11ЛсБЛЯёвЛИіЗтБеЛЗЛђепГЄИЫ41ЩЯЕФ40ЫљЪОЕФзАжУЫљБЃЛЄЁЃетжжЗНЪНЃЌПЩвдШУвЛИіШЫдкВЩеЊЫЎЙћКЭМсЙћЪБВЛБиФУвЛИіЬнзгХРЕНКмИпЕФЕиЗНШЅВЩеЊЖјПЩвдгУЪжжБНгШЅВЩеЊЁЃ
ЯждкЕФЯъЪівбОЬжТлСЫдѕбљШЅЪеМЏЫЎЙћЃЌЖјЫЎЙћетИіДЪгявВБЛгУзївЛИіЭЈгУЕФЖЈвхЃЌжМдкАќРЈЦЛЙћжЎРрЕФЫЎЙћЃЌИЬщйРрЫЎЙћШчСјГШЁЂФћУЪКЭЫсГШвдМАЬвзгКЮРцЁЃЭЈЙ§бЁдёКЯЪЪЕФеТЗжБОЖЃЌМсЙћЕФЪеЛёЖМПЩРћгУДЫЯрЭЌЕФдРэЁЃШЮКЮНЈжўгУГЃЙцВФСЯПЩвдВЩгУЕФЩшБИЃЌЖМПЩвдзїЮЊДЫзАжУЕФЫмСЯВФСЯбЁдёЁЃФкВПОлКЯзЖаЮВПЗж20ПЩвдгЩФЃбЙЫмСЯжЦГЩЃЌШчОлЫФЗњввЯЉЃЌФсСњЃЌввЯЉЛђЦфЫћЯрЫЦВФСЯЃЌЖјдВжљЭВ16ВФСЯвВПЩвдгУЯрЫЦВФСЯжЦзїЁЃЭтВПЬзЙм15ЪЧЗЧГЃМсЙЬЕФЃЌЫќПЩвдЪЧШЮКЮЯывЊЕФНЈжўВФСЯРДжЦзїЁЃ
ЮввЊЧѓЃК
1. ДгЪїЩЯВЩеЊЫЎЙћЕФзАжУАќРЈЃК
a. ЪзЯШЪЧСйНќЕквЛВПЗжжеЕуЙмЕРЕФёюКЯЗНЪНвдМАЫљИНДјЕФецПедДЃЛ
b. ВЩеЊЭЗеТЗВПЗжАќРЈФкВПКЭЭтВПЙмЕРВПЗжЃЌФкВПЙмЕРдкЦфИљВПгавЛИіПЊЗХЪНЫЎЙћНгЪеЦїЃЌЭЈГЃЕФШсадНгЪеВПЗждкЦфФкВПгаПЊЗХЪНЕФФкВПОлКЯзЖаЮВПЗжЃЌФкВПЕФОлКЯзЖаЮВПЗжЕФжБОЖВЛЛсБШЪеЛёЕФЫЎЙћЕФжБОЖвЊДѓЃЌвЛАуЕФИеаддВжљВПЗжгыФкВПОлКЯзЖаЮВПЗжЕФЕзВПЯрзщКЯЃЌвтЮЖзХЖЈвхЮќШыЪНПЊПквдМАИеаддВжљЯрХўСкЕФФкВПОлКЯзЖаЮВПЗжЃЛ
c. ЕкЖўИіЭЈГЃЪЧШсадЕФзЖаЮСЌНгЕНИеаддВжљЯрЖдгІЕФФкВПОлКЯзЖаЮЕФЕзВПЃЌвдЪЪгІОлКЯзЖаЮВПЗжаЮГЩвЛИіСщЛюЕФЙиБеЃЛ
d. ЭтВПЬзЙмБЛЙЬЖЈдкФкВПЬзЙмжсЯђМфОрЕуЯрЗДЗНЯђРДЫЕУїЃЛ
e. етвВвтЮЖзХДгЖЈвхЩЯЫЕЃЌЭтЛЗКЭёюКЯЗНЪНБэЪОЭтЛЗВПЗжЃЌЕквЛНкЙмЕРЭтБкЩЯвВгавЛИіЖЫПкЁЃ
2. ЙћЪЕЪеЛёзАжУШчзЈРћвЊЧѓ1ЫљЪіЃЌБЛЬиБ№УшЪіЕФЕМЯђЬзЭВЙЬЖЈИеаддВжљЬхЃЌгЩДЫОіЖЈИНЩЯЕкЖўИізЖаЮВПЗжЁЃ
3. ДгЩшМЦвЊЧѓ1ЫљЬиБ№вЊЧѓЕФЫЎЙћВЩеЊзАжУецПеВПЗжЕФЕквЛНкЙмЕРБЛАВзАвЛИіецПеЮќШыПЊПкЁЃ
4. ДгЩшМЦвЊЧѓ3ЫљЬиБ№вЊЧѓЕФЫЎЙћВЩеЊзАжУЕФЕкЖўИіШсадзЖаЮВПЗжРДЪЪгІЭЈЙ§ПЊЗХЪНЮќШыецПездааЙиБеЁЃ
5. зЈРћвЊЧѓ1жаЫљНчЖЈЕФЫЎЙћВЩеЊзАжУЃЌЬиБ№ЪЧФкВПОлКЯзЖаЮВПЗжПЩвдЕЏадБфаЮЁЃ
