题 目 基于卫星无源探测的空间飞行器主动段的
轨道估计与误差分析
摘 要
本文通过坐标转换、力学分析、拟合、最小二乘、微分方程的数值解法、误差分析等方法,建立了基于卫星无源探测的空间飞行器在主动段的交汇定轨优化模型和运动方程模型,对卫星的系统误差、飞行器轨道进行了估计。
针对问题一:直接通过卫星的初始状态和运动方程,应用微分方程的数值解法估计了卫星的轨道,并探讨了进行迭代时时间步长的稳定域。
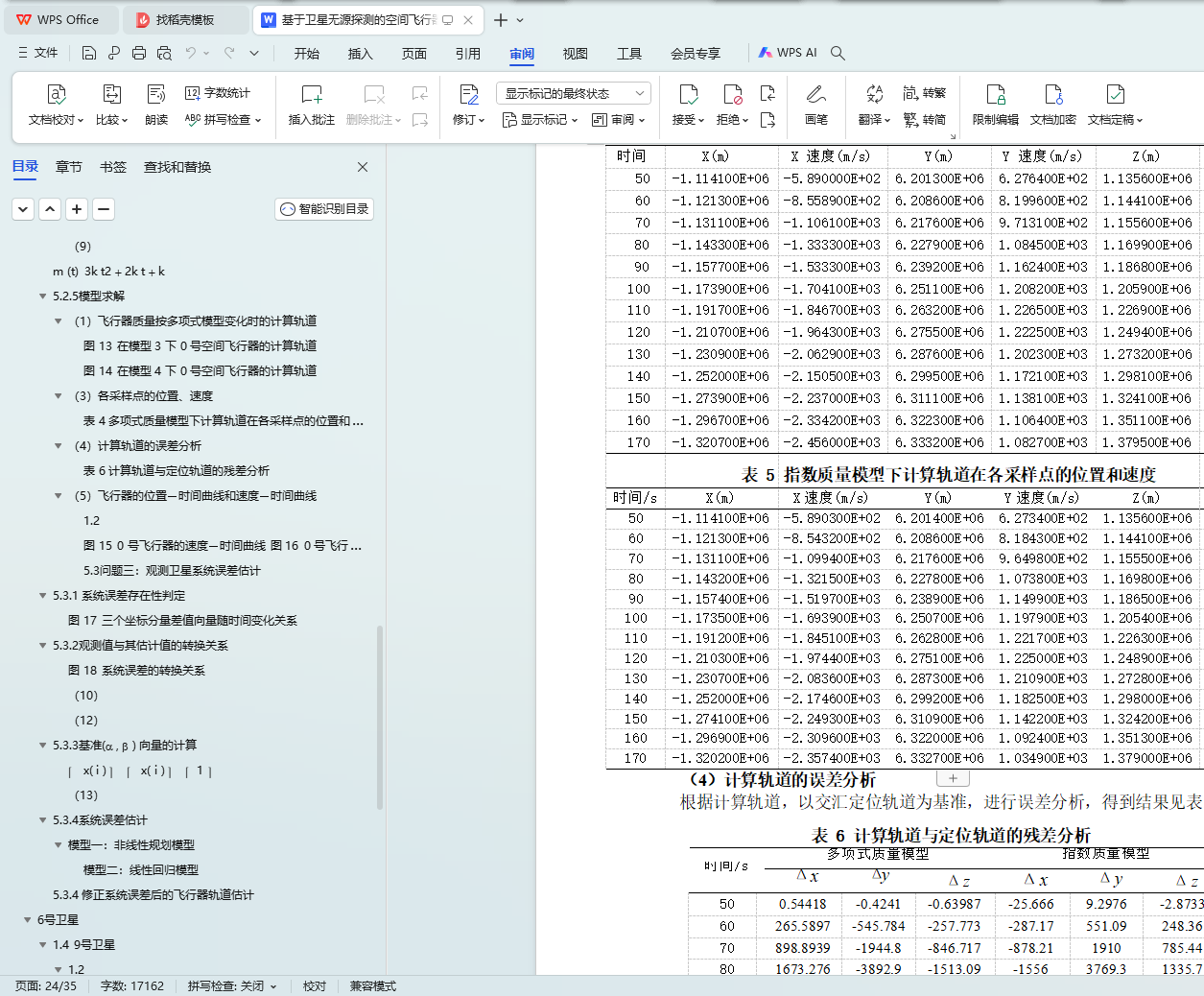
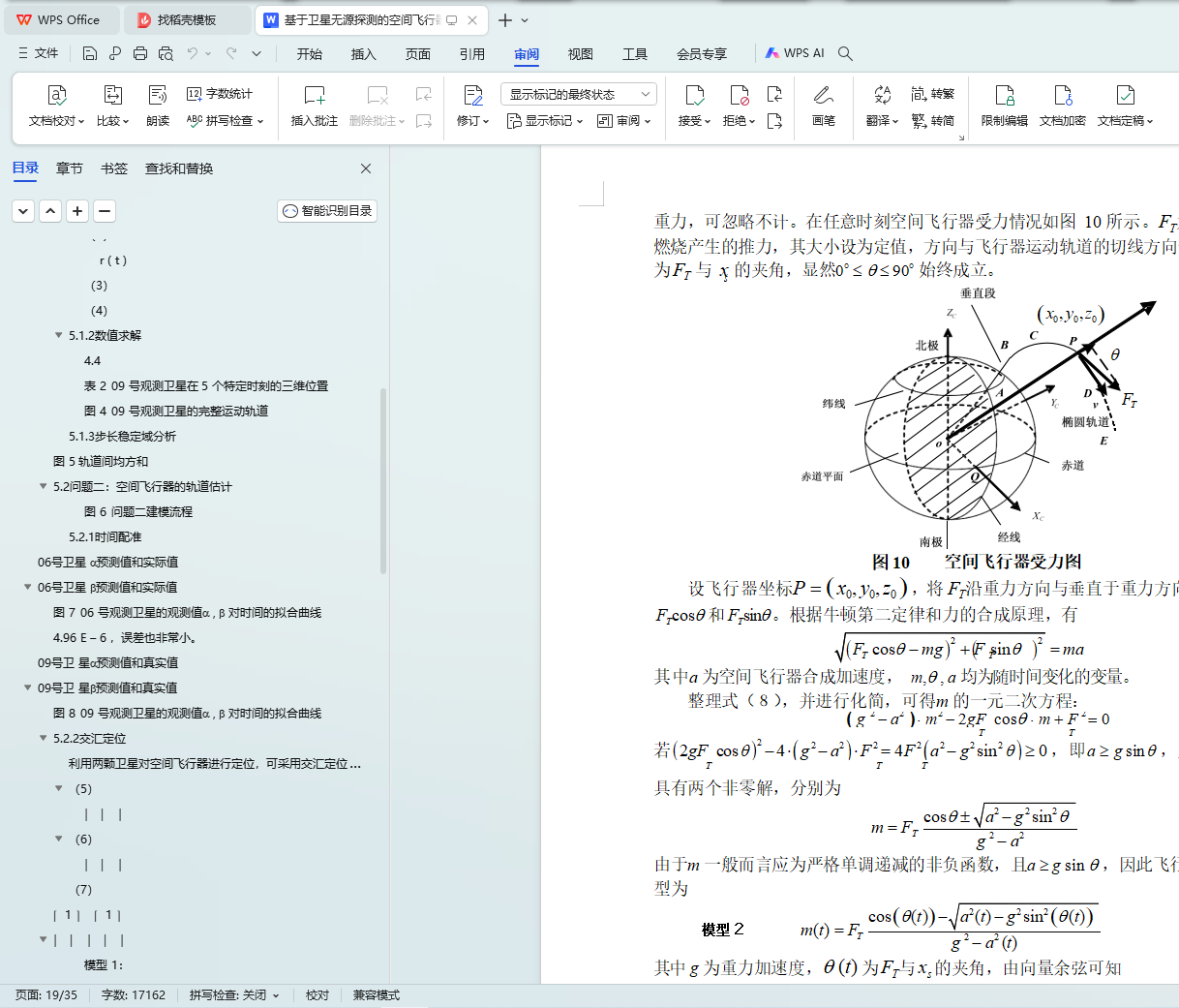
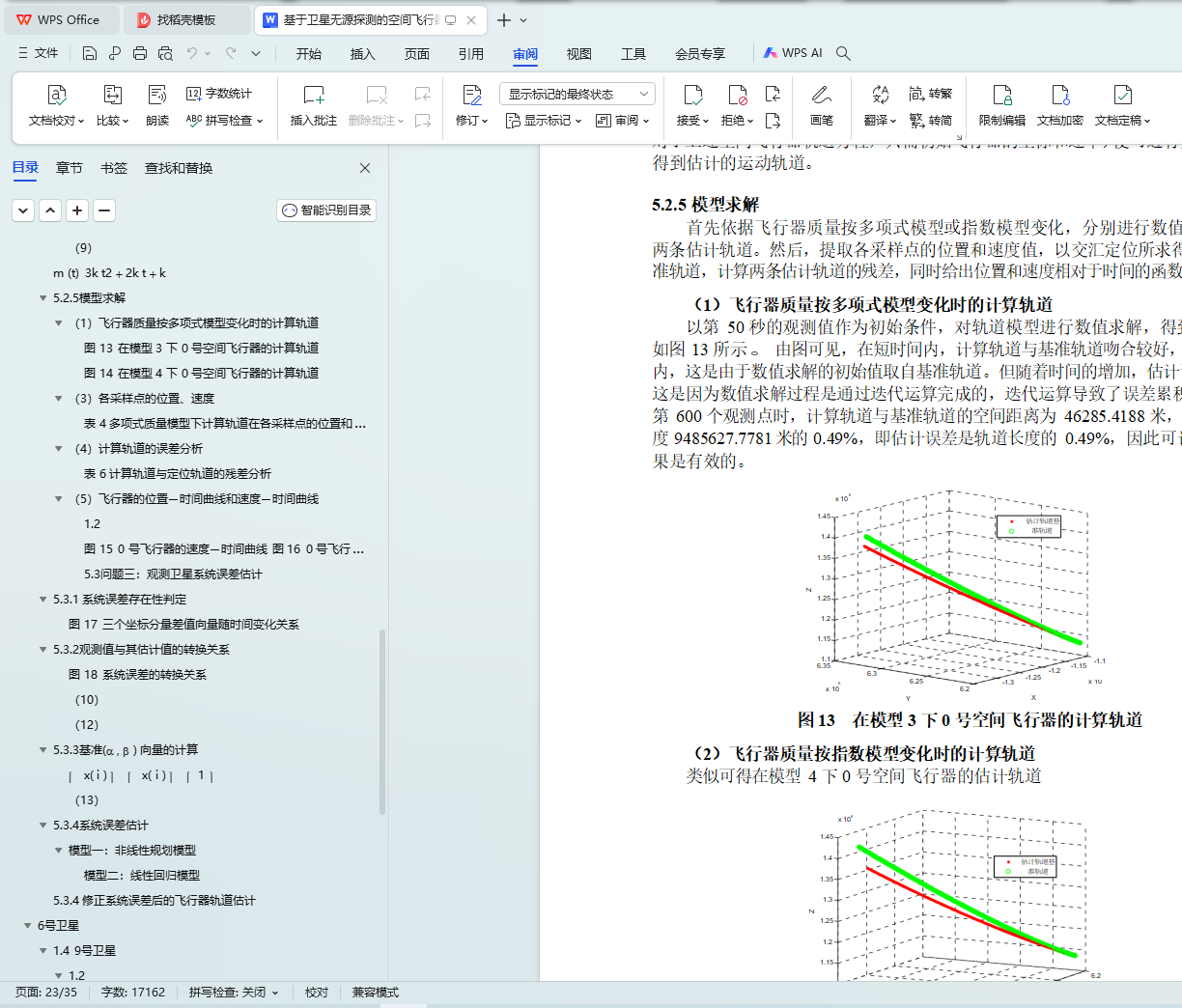
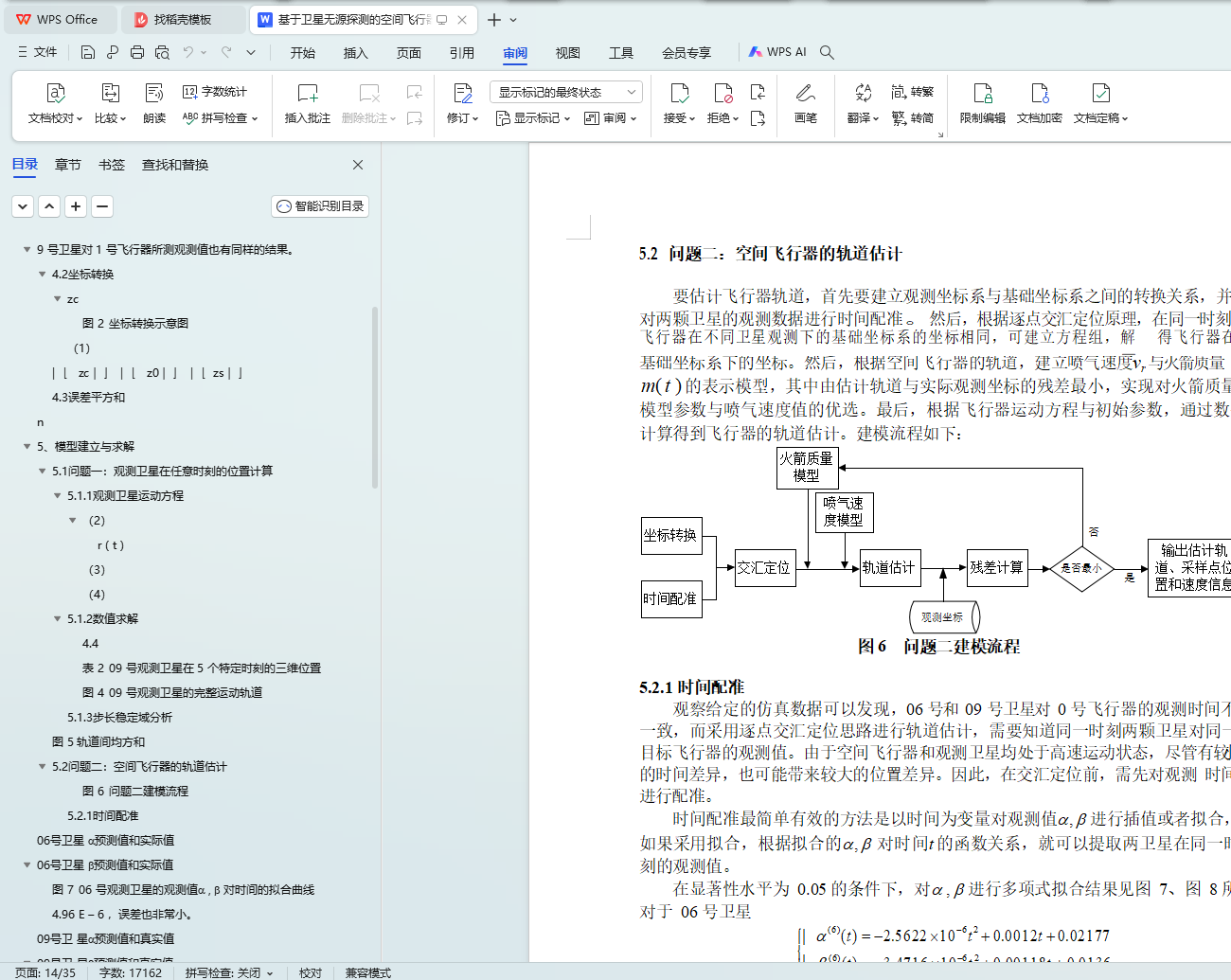
针对问题二:首先对 06 号和 09 号卫星进行了时间配准,根据坐标转换,建立了双星交汇定位的优化模型,得到了飞行器的初步轨道;其次通过力学分析,建立了飞行器的质量模型,通过交汇定轨结果,对飞行器质量进行了多项式和指数拟合; 然后结合质量模型、喷气速率的假定和飞行器运动方程建立了微分方程模型;最后通过数值求解,得到了所求的采样点的轨道和速率,并作了误差分析。
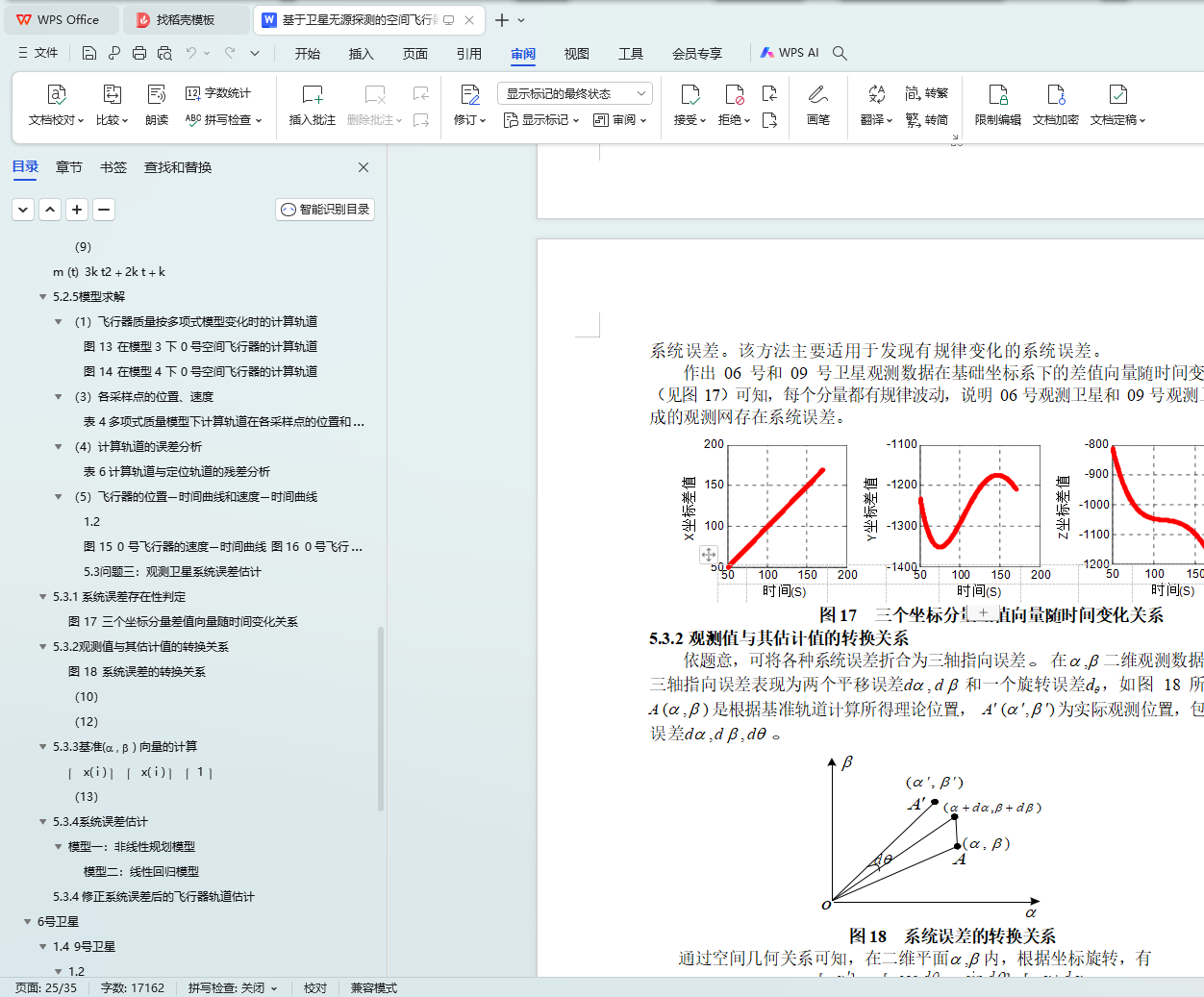
针对问题三:首先根据误差分析理论对系统误差的存在性进行了判定;其次借助系统误差含义,建立了a, b 的真值和观测值的转换公式;然后将问题二中得到飞
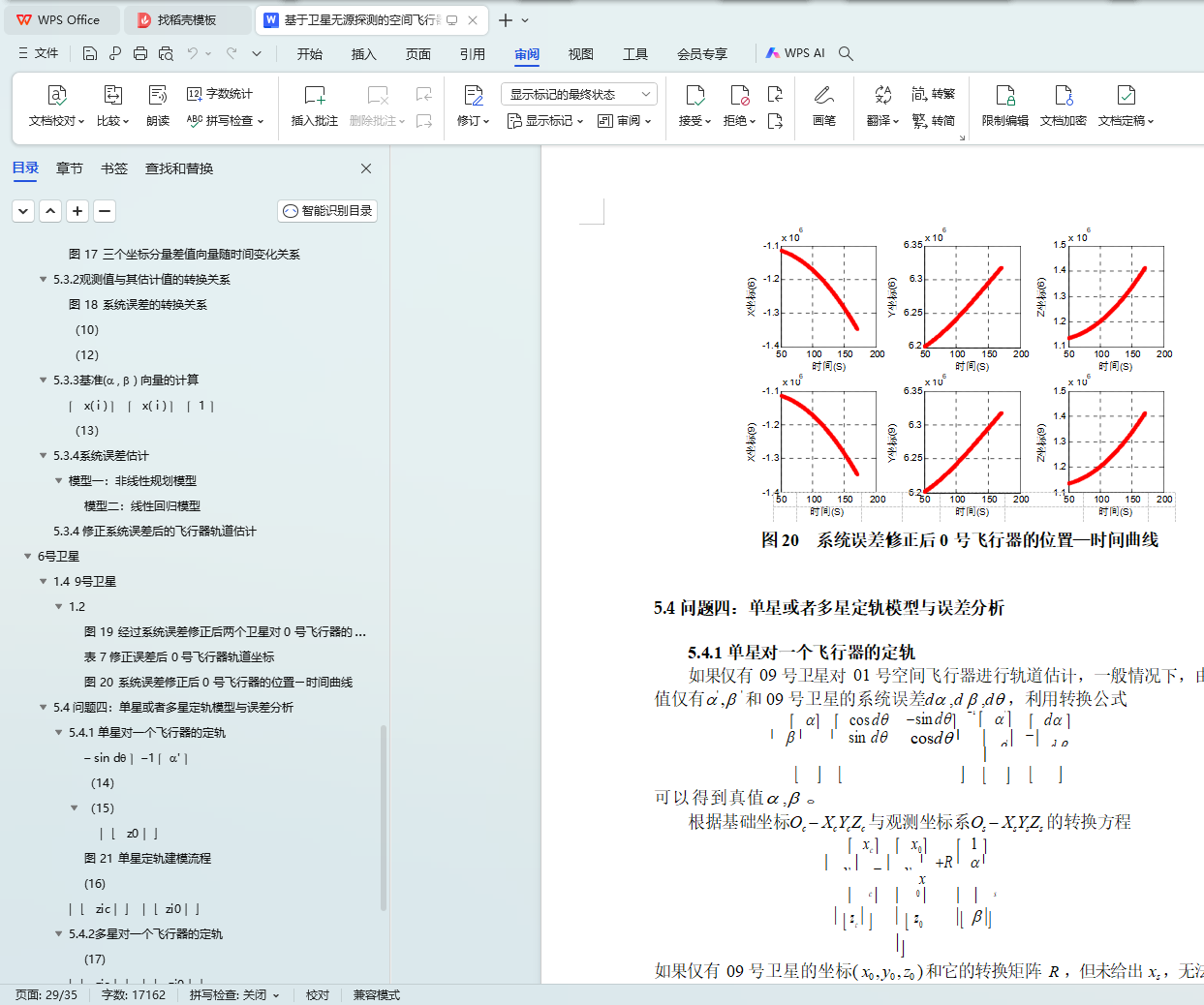
行器计算轨道视为基准轨道,通过坐标转换,得出它在测试坐标系下的坐标;最后通过系统误差的转换公式,建立了最小二乘优化模型,用 Matlab 求解得到了 06 号和 09 号卫星的系统误差,并通过误差修正了原基础坐标,对轨道重新估计,误差
平方和达到 7.5821 米。
针对问题四:对单星、单飞行器定轨情况,提出了一个合理的假定,建立了优化模型,并对 01 号飞行器的轨道进行了估计,得到了相应结果;对多星、单飞行器定轨情况,提出了一个定轨的最小二乘优化模型;对多星、多飞行器的定轨情况提出了首先要研究的两个难点,才能联合进行系统误差估计。
关键词:卫星 飞行器 轨道 系统误差 参数估计