题 目 基于卫星云图的风矢场(云导风)度量模型与算法探讨
题 目 基于卫星云图的风矢场(云导风)度量模型与算法探讨
摘 要:
本文主要研究如何通过卫星云图,识别移动云块,计算风矢的问题,建立了滑动搜索图像匹配模型,基于数据的自适应搜索模型,基于统计参数的自适应模型,具体内容包括:
在问题一中,根据灰度矩阵的行列坐标得到观测点相对卫星在南北方向的俯仰角j1 与东西方向的俯仰角j2 ,列写点法式平面方程。通过该空间曲面方程组求
解地球上对应点,可以求解避免复杂的三角方程,并精确地实现灰度矩阵坐标到经纬度的转换。在灰度图上标注海岸线实际上是由已知地球上点经纬度,求解其在灰度矩阵上的对应坐标的过程。利用椭球的参数方程直接得到待求点在地球上
的坐标,再利用三角函数边角关系,求得j1 与行扫描角j2 大小,根据角度与扫描
间隔的关系求出灰度矩阵上的行列坐标,从而在图上标注出海岸线。
问题二首先利用问题一中的公式,将待求点经纬度转化为灰度矩阵上的行列坐标。之后对灰度矩阵进行数据预处理,首先利用相邻帧差法来进行动态检测, 区分具有动态特性的云与相对静止地物。该方法在区分云与冰盖及低温大陆中效果显著。借助中等灰度阈值法截取潜在云块的分布位置,将二者叠加得到全球云块分布情况,最后用高等灰度阈值截取法修补由于相邻帧差法带来的某些纹理均匀云块中心的漏洞。完成数据预处理后,通过建立滑动搜索图像匹配模型,采用相对成熟的交叉相关系数来衡量示踪云模块与追踪云模块的匹配程度,从而识别云块的移动。在完成云块识别后,利用时间连续性方法,对不正确风矢进行剔除。最终得到有效风矢在灰度图像上的起始点与终点的行列坐标,换算成经纬度后, 利用平均半径,计算两点间球面距离。通过推导球面三角形的余弦定理,巧妙地解决了风矢方向空间角度的计算,并给出了题中要求点的计算结果。
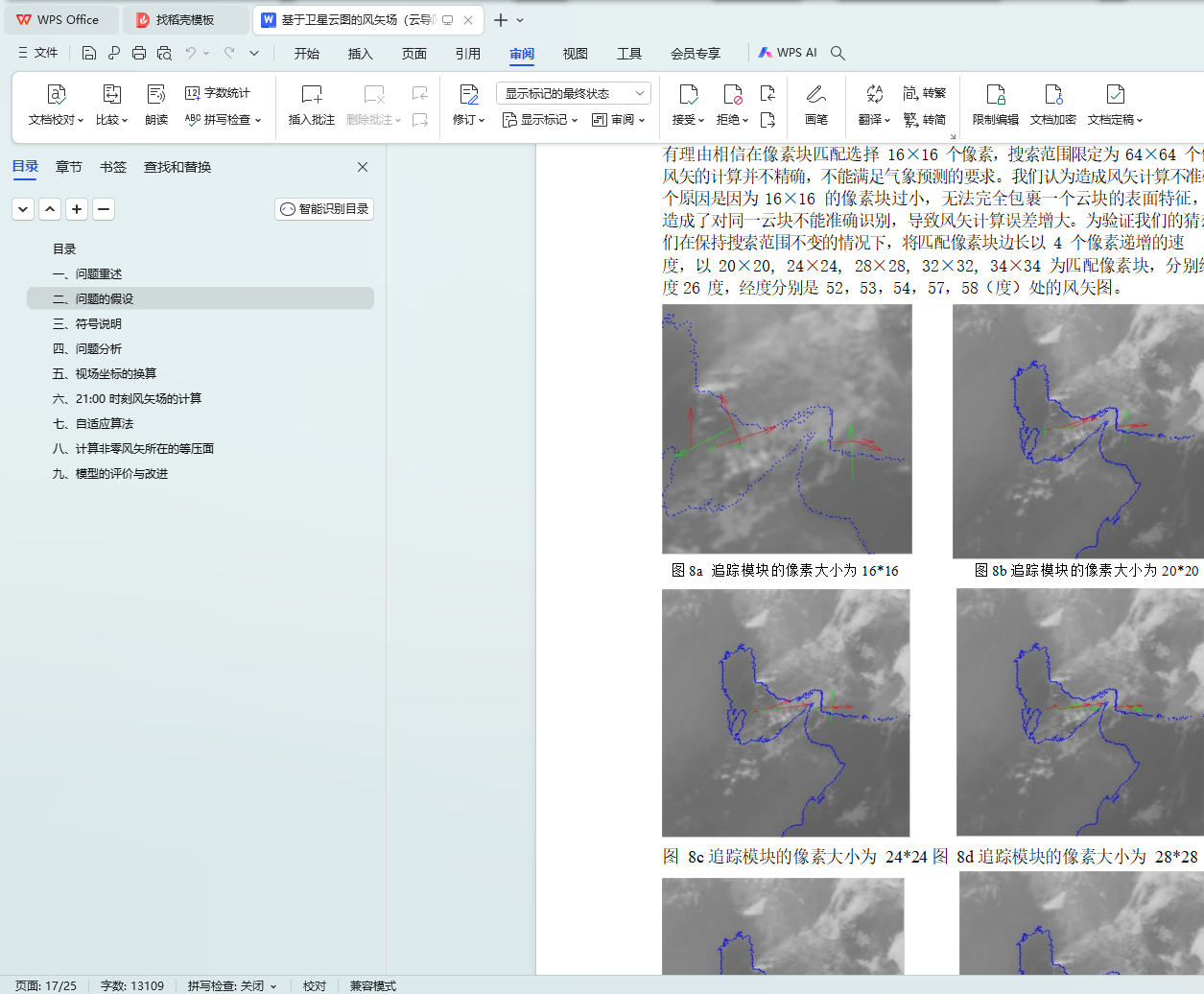
在完成问题二计算后,我们通过对质量控制后有效非零风矢比例以及所生成图像进行了分析,发现在题目给定的像素块匹配所选用的窗口大小为 16×16 个
像素,搜索范围限定为 64×64 个像素条件下,得到的 20:30 时刻风矢与 21:00 时刻风矢无论在速度上还是夹角上都有较大突变,说明在该条件下风矢计算精度较差,风矢场整体不协调。针对这个问题,我们在搜索区域像素大小不变的情况下,以 4 个像素为步长,针对题中所求的 5 个点,利用由 16×16 递增到 36×36 的搜索匹配像素块进行风矢计算。计算所得图像显示随着搜索匹配像素块边长增大到 28 像素后,同一点相邻时刻风矢计算结果相关性增强,速度与方向均符合云块运动的规律。由此可认定根据题中所给定的搜索条件计算出的风矢误差较大。
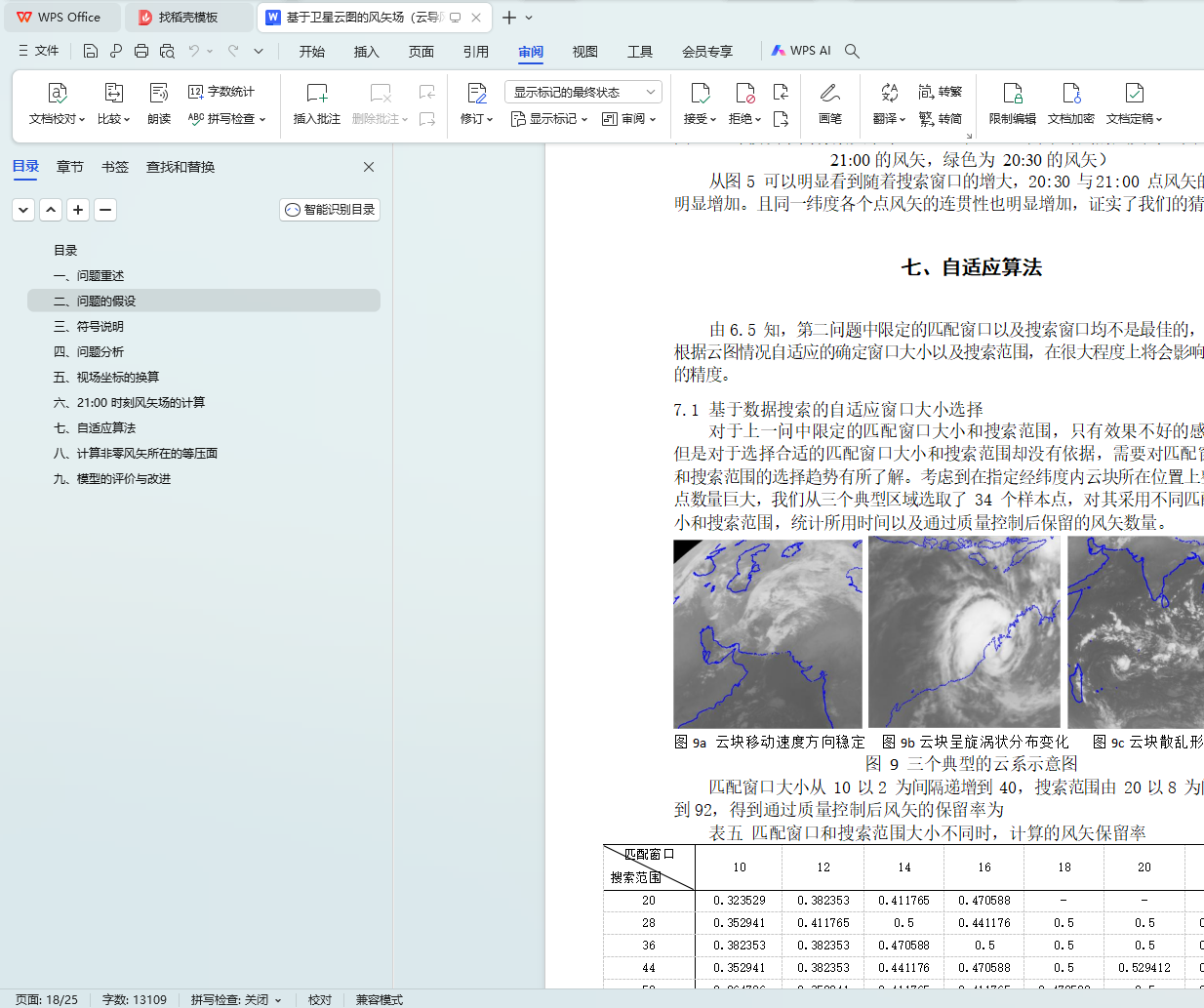
针对问题二中发现的问题,我们设计了两种确定搜索匹配像素块以及搜索范围大小的自适应算法:其一为基于数据的搜索算法,其二为基于统计参数的自适应搜索算法。前者针对若干个从处理后的灰度矩阵中随机选取的云块,利用算法速度与有效非零风矢比例构造一个评价指标。通过计算搜索块边长 l 与搜索范围
d 边长在取值区间内所有组合的评价指标,选出最优的 l 与 d 取值。计算结果表明,l=32,d=40 时取得最优评价指标,基于云块移动极值估计,将 d 扩大为 64, 并且利用该参数对文中所求点进行计算也得到了较好的结果。基于统计参数的自适应搜索算法则利用标准差与均值加权构成评价函数,求取搜索块边长在取值区间内取得极值处的 l 值。使得最优搜索块边长 l 能够根据不同的云块自适应变化。再利用上一时刻云块风矢速度动态的求取当前时刻搜索范围 d 边长的大小。计算结果表明该算法与前一算法虽取值不同,但在风矢计算上都取得了较好的效果。
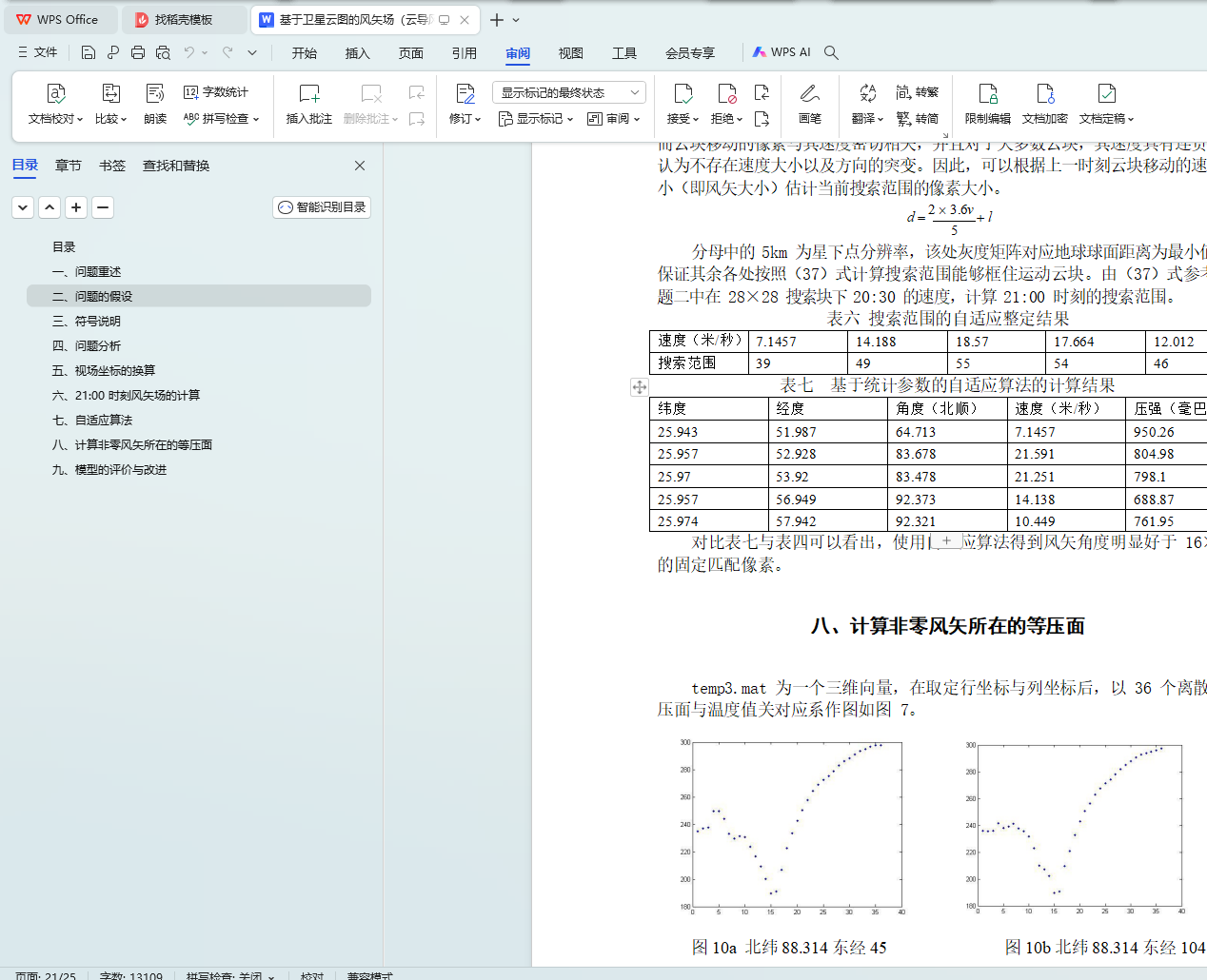
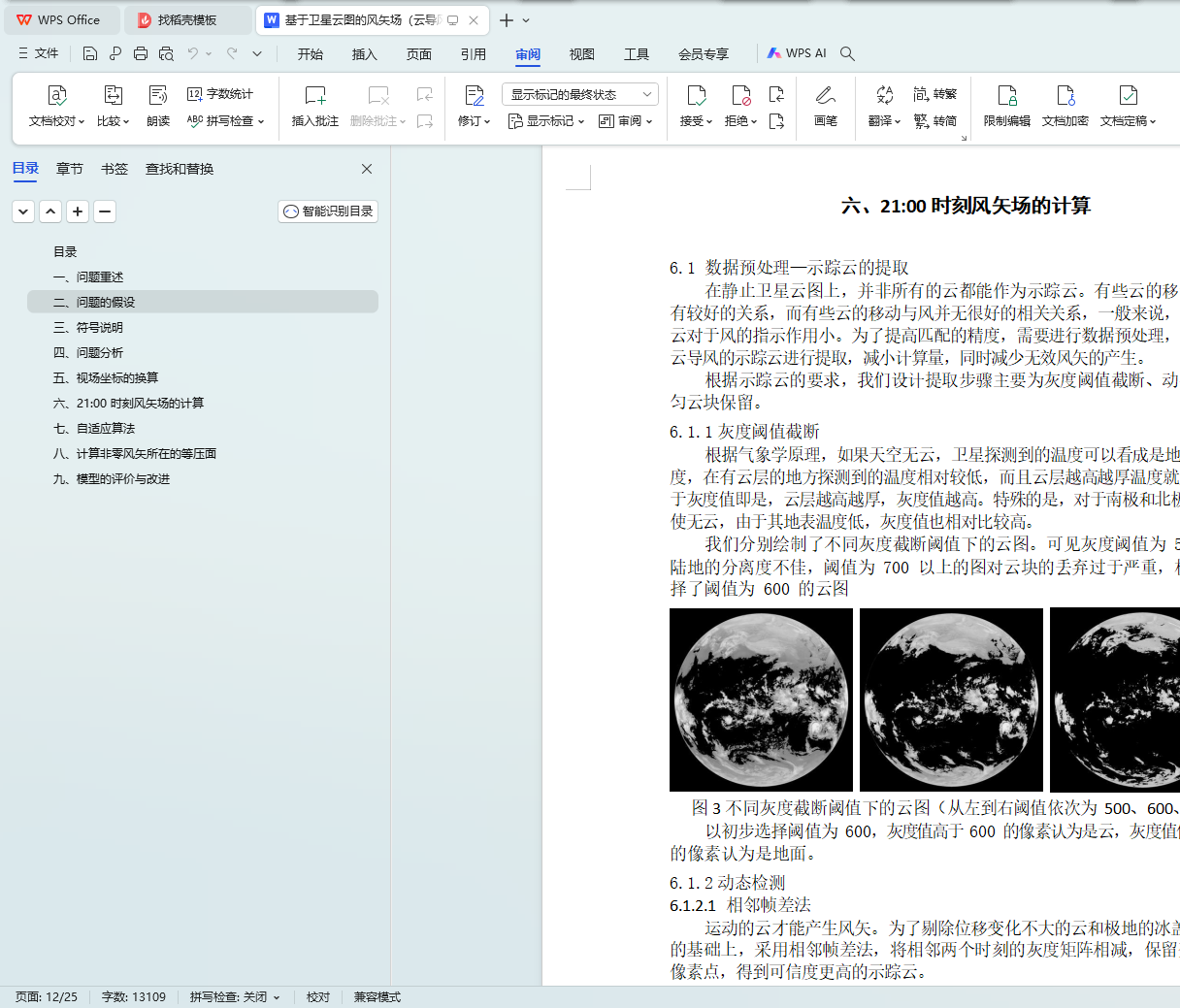
问题四要求计算给定坐标处风矢的等压面。通过查表可得灰度与温度的对应关系。参照相关文献,剔除 temp3.mat 文件中云层不存在的等压层,利用内插法, 确定风矢所在的等压面。并根据计算绘制卫星云图。
目录
一、问题重述 4
二、问题的假设 4
三、符号说明 5
四、问题分析 6
4.1 视场坐标的换算 6
4.2 21:00 时刻风矢场的计算 6
4.3 自适应算法模型的探索 6
4.4 计算非零风矢所在的等压面 7
五、视场坐标的换算 7
5.1 将灰度矩阵的行列号映射为地球的经纬度 7
5.2 将海岸线经纬度转换至灰度矩阵对应位置 8
5.2.1 第 I 卦限的计算 9
5.2.2 第 IV 卦限的计算 9
5.2.3 第 V 卦限的计算 10
5.2.4 第 VIII 卦限的计算 10
六、21:00 时刻风矢场的计算 11
6.1 数据预处理―示踪云的提取 11
6.1.1 灰度阈值截断 11
6.1.2 动态检测 11
6.2 示踪云的追踪 12
6.3 风矢的计算 13
6.4 质量控制 14
6.4.1 时间连续性控制 14
6.4.2 空间连续性质量控制 15
6.4.3 云地分离 15
6.5 窗口大小和搜索范围对计算结果的影响 15
七、自适应算法 17
7.1 基于数据搜索的自适应窗口大小选择 17
7.2 基于统计参数的自适应算法 19
7.2.1 基于云块纹理的自适应窗口大小算法 19
7.2.2 搜索范围的自适应整定 19
八、计算非零风矢所在的等压面 20
九、模型的评价与改进 21