摘 要
本文对一种基于路径规划的走迷宫轮式移动机器人的设计给予了简要介绍。该设计的目的是设计一种在与地面颜色有较大差别的导引线行进环境中,反射式光电传感器感知导引线,障碍判断采用红外传感器,驱动电机采用直流电机电机控制方式为单向PWM开环控制,控制核心采用51单片机控制系统。基于自动导引小车的原理,实现小车识别路线,判断并自动躲避障碍,选择正确的行进路线。控制上采用分时复用技术,仅用一块单片机就实现了信号采集、路线判断和电机控制等功能。
机器鼠可以分为三部分――传感器部分、控制器部分、执行器部分。以51单片机控制系统控制和检测红外传感器;微控制器根据检测到的传感信号,通过驱动芯片L293D控制电机驱动电路,调整行走,按照载入算法进行迷宫的探测,寻找最佳路径,最终实现从起点到终点。
关键词: 导引线 传感器 单片机 信号采集
Robot around the maze
Abstract
In this paper, based on the maze path planning the design of wheeled mobile robot given a brief introduction. The design objective is to design a ground color with large difference in the guide line of the road environment, the reflective optical sensor sensing guide wire, barriers to judge by infrared sensors, drive motors with DC Motor Control PWM mode for the one-way opening loop control, control, control system microcontroller core with 51. Automatic Guided Vehicle Based on the principle of achieving recognition car line, determine and automatically avoid obstacles, to choose the right road routes. Control using time-multiplexing, only a single chip to achieve signal acquisition, line judge and the motor control functions.
Machine mouse can be divided into three parts - part of the sensor, the controller part of the actuator part. 51 single chip control system to control and detect infrared sensor; micro-controller, the sensor signals in accordance detected by driver IC L293D control the motor drive circuit, adjustments to walk the labyrinth in accordance with load detection algorithm to find the best path, and ultimately From start to finish.
Key words: Guide lines Sensor SCM Signal Acquisition
目 录
1 引言
2 绕迷宫机器人概述
3总体方案
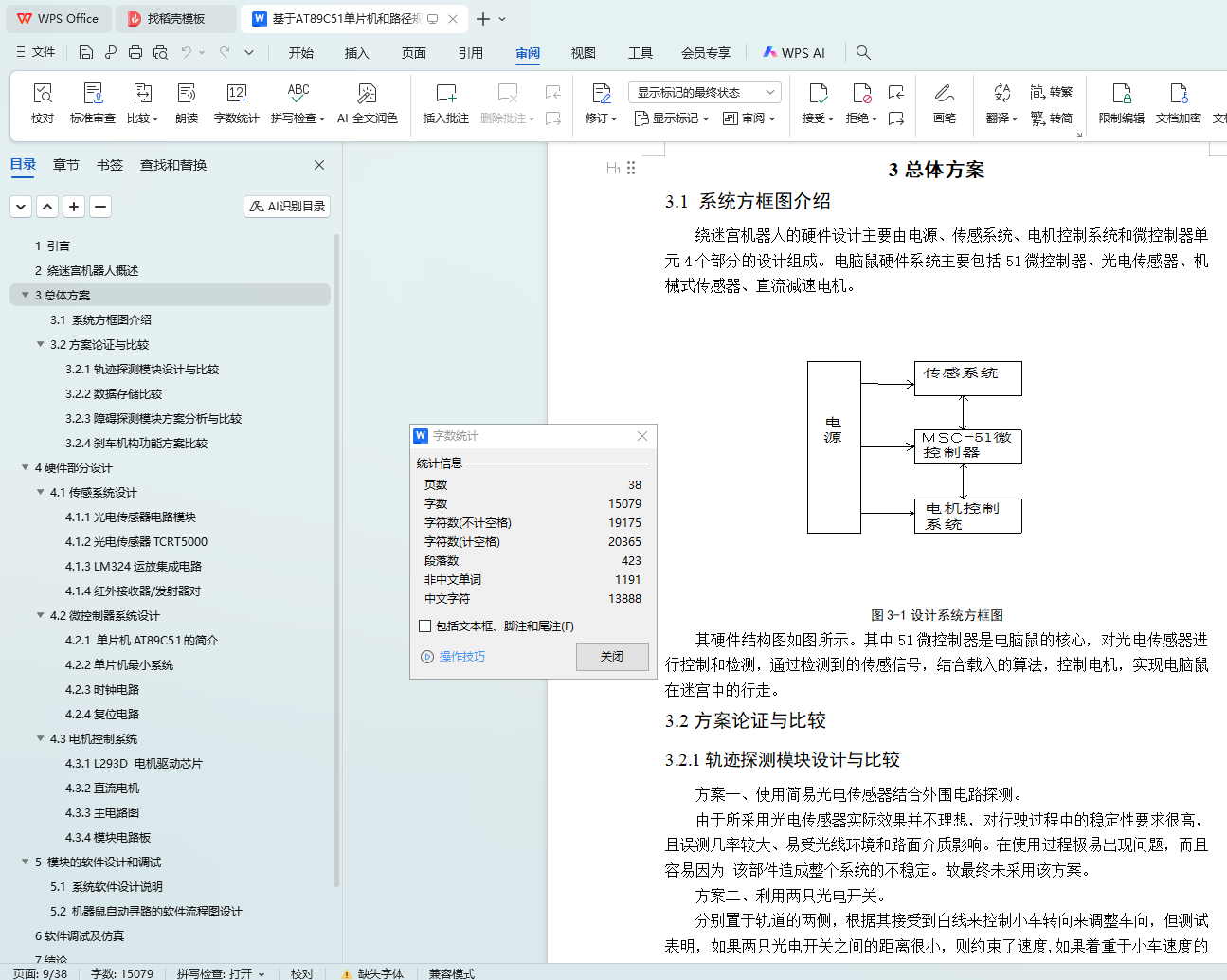
3.1 系统方框图介绍
3.2方案论证与比较
3.2.1轨迹探测模块设计与比较
3.2.2数据存储比较
3.2.3障碍探测模块方案分析与比较
3.2.4刹车机构功能方案比较
4硬件部分设计
4.1传感系统设计
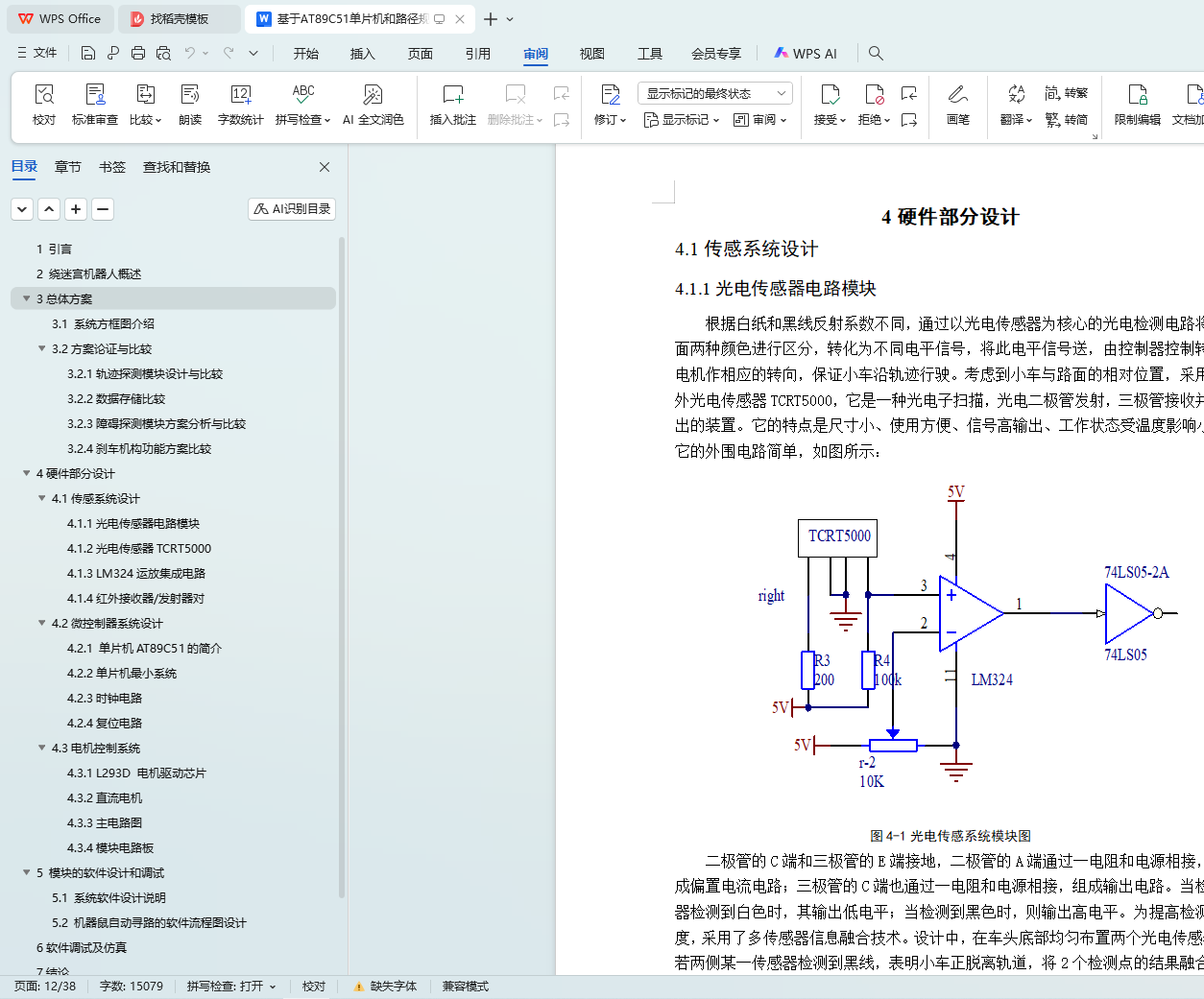
4.1.1光电传感器电路模块
4.1.2光电传感器TCRT5000
4.1.3 LM324运放集成电路
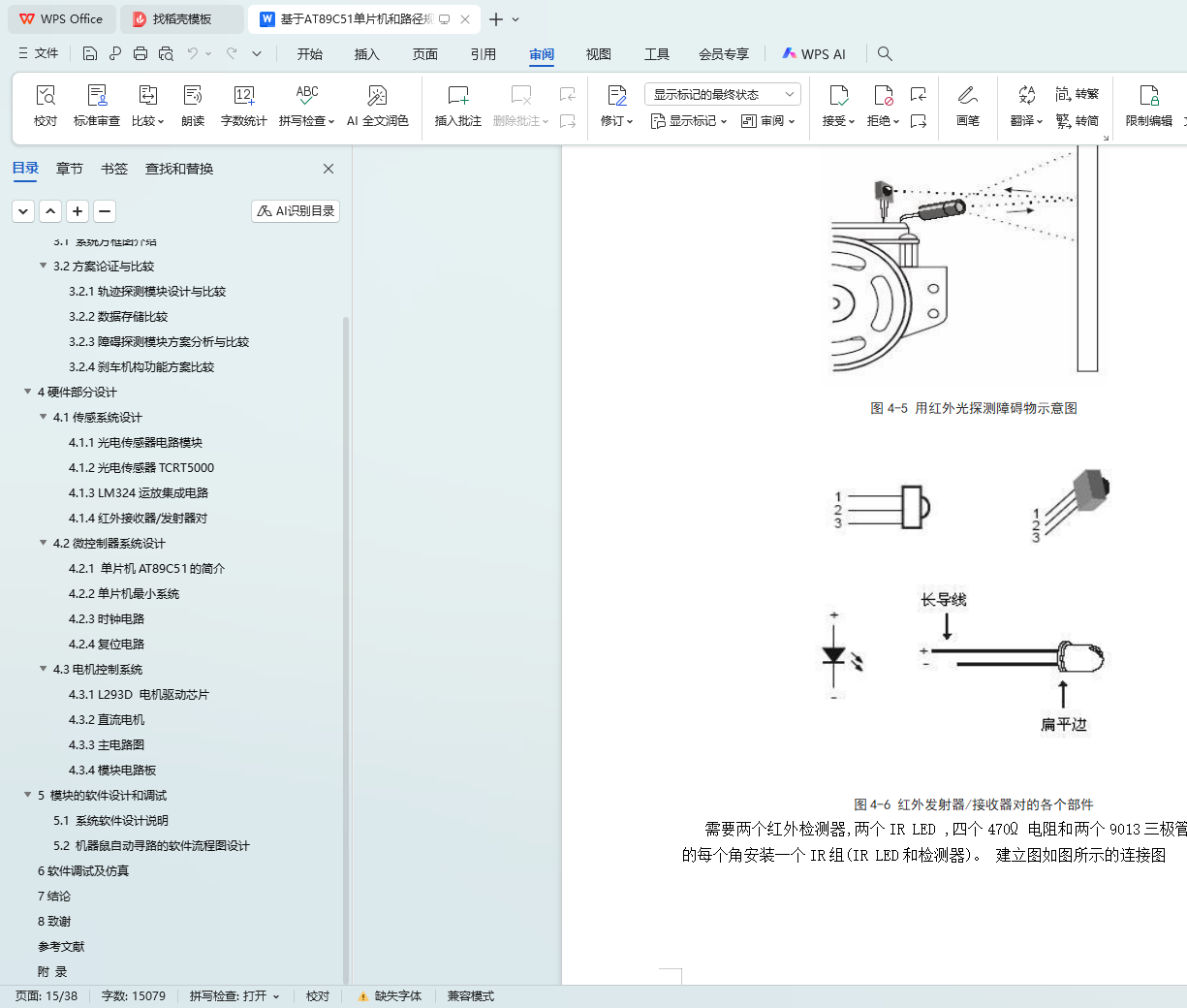
4.1.4红外接收器/发射器对
4.2微控制器系统设计
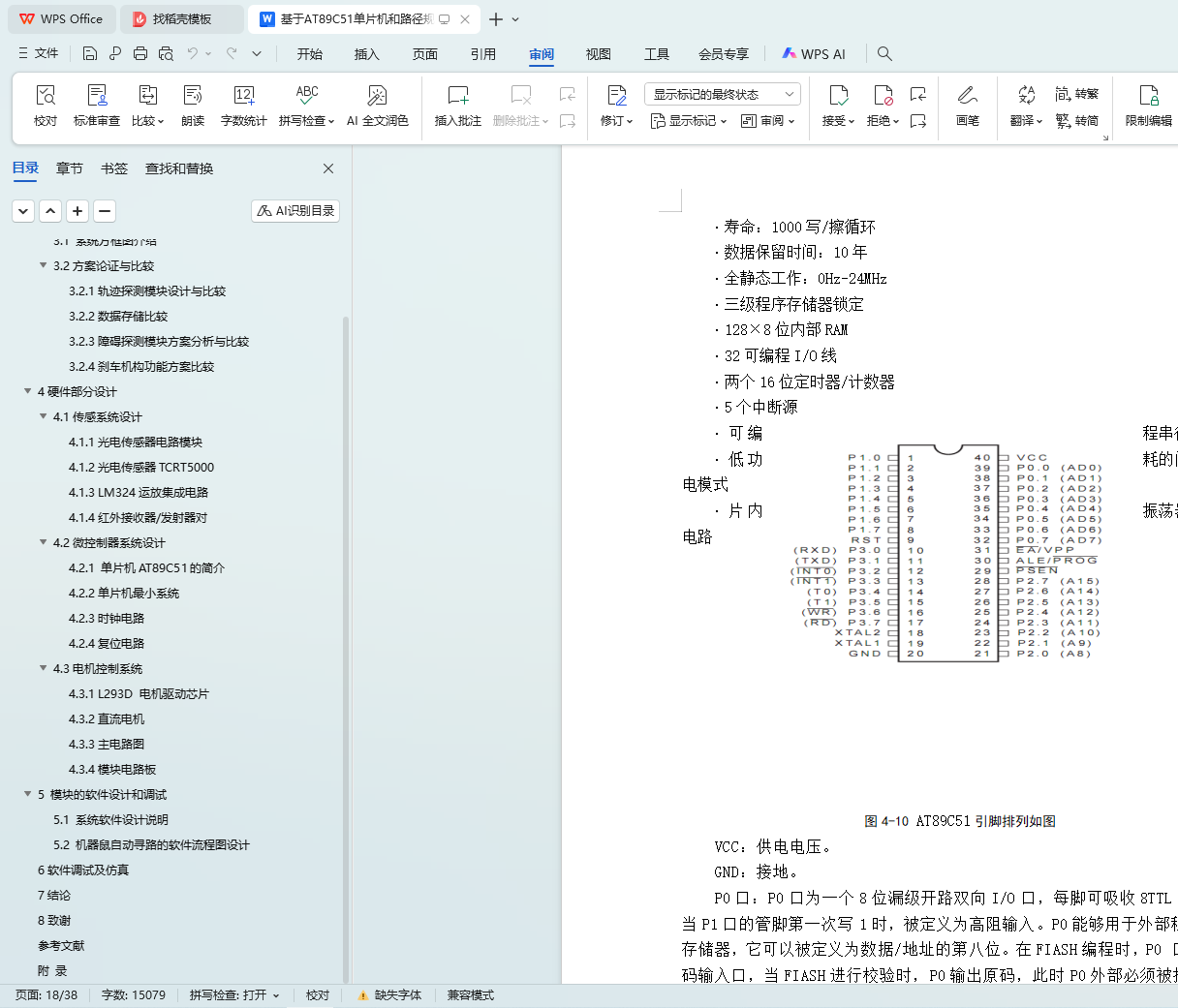
4.2.1 单片机AT89C51的简介
4.2.2单片机最小系统
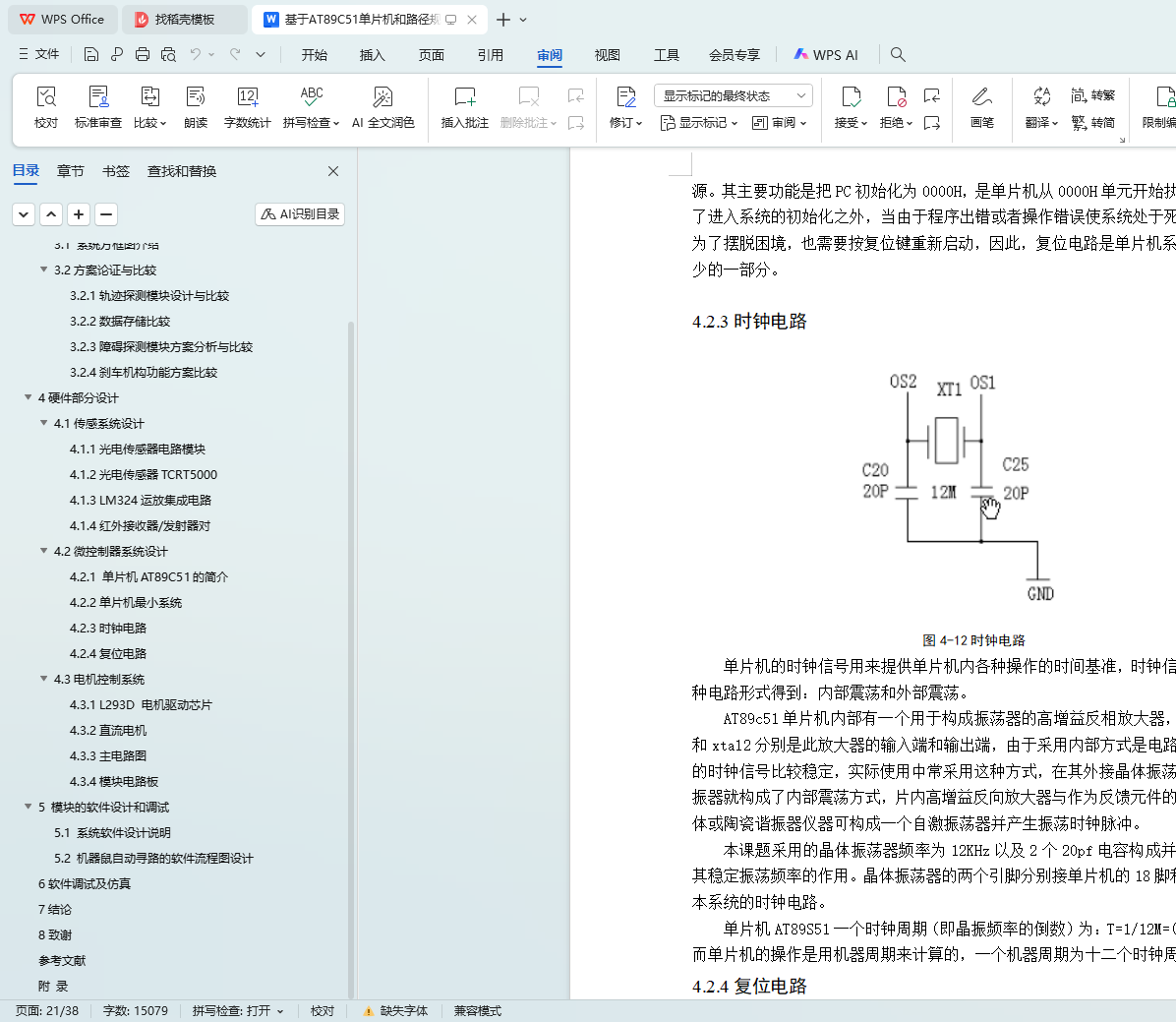
4.2.3时钟电路
4.2.4复位电路
4.3电机控制系统
4.3.1 L293D 电机驱动芯片
4.3.2直流电机
4.3.3主电路图
4.3.4模块电路板
5 模块的软件设计和调试
5.1 系统软件设计说明
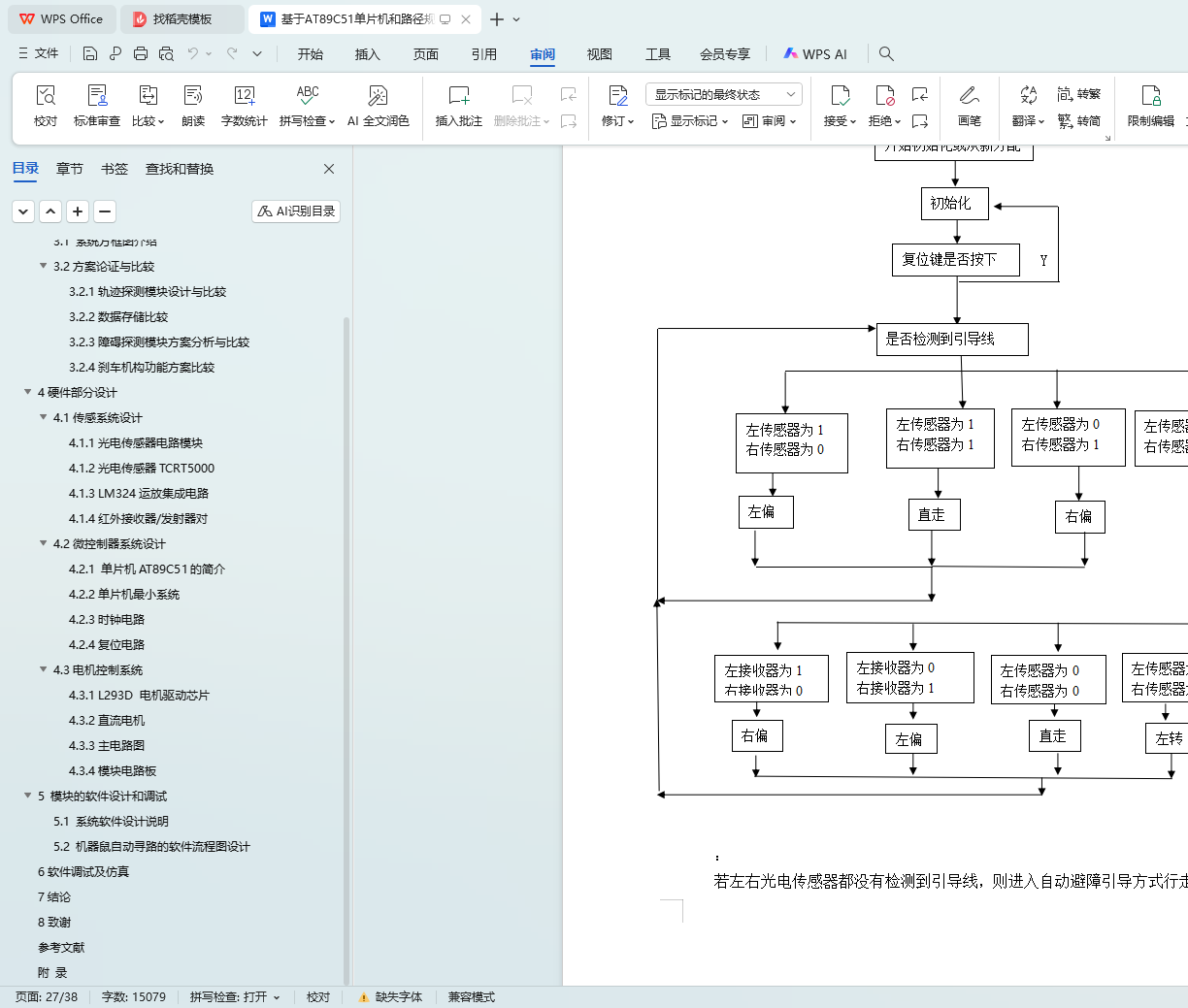
5.2 机器鼠自动寻路的软件流程图设计
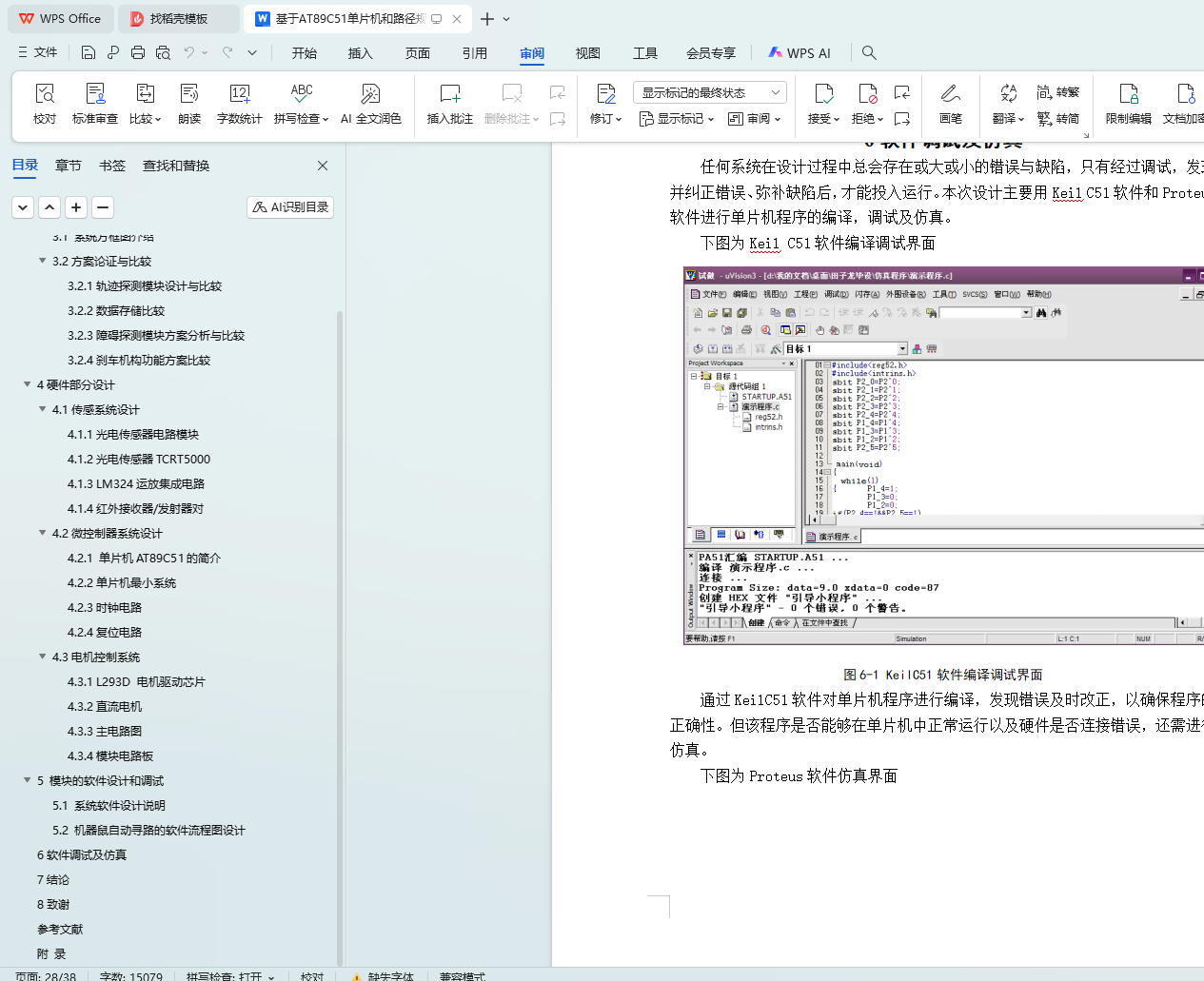
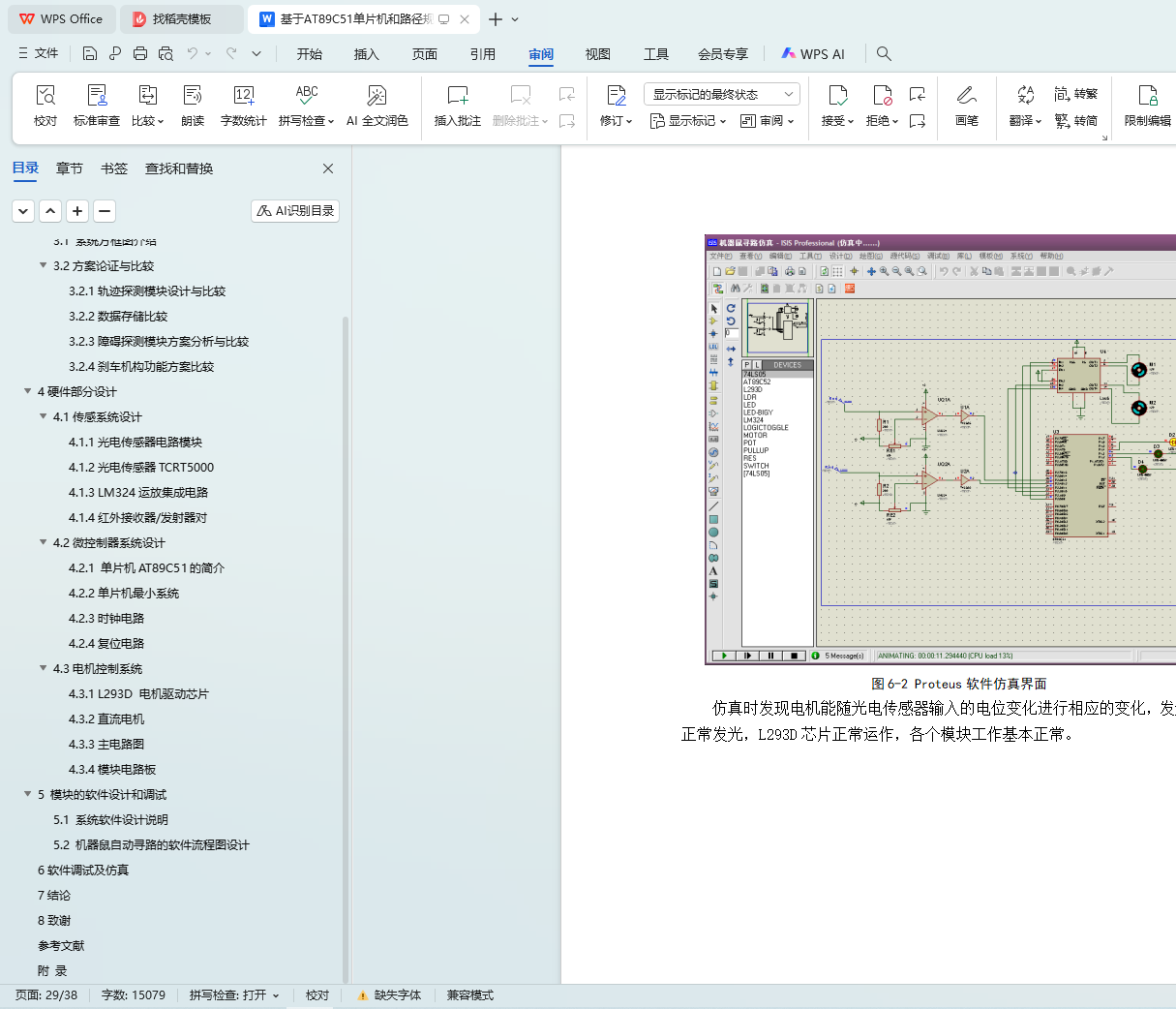
6软件调试及仿真
7结论
8致谢
参考文献
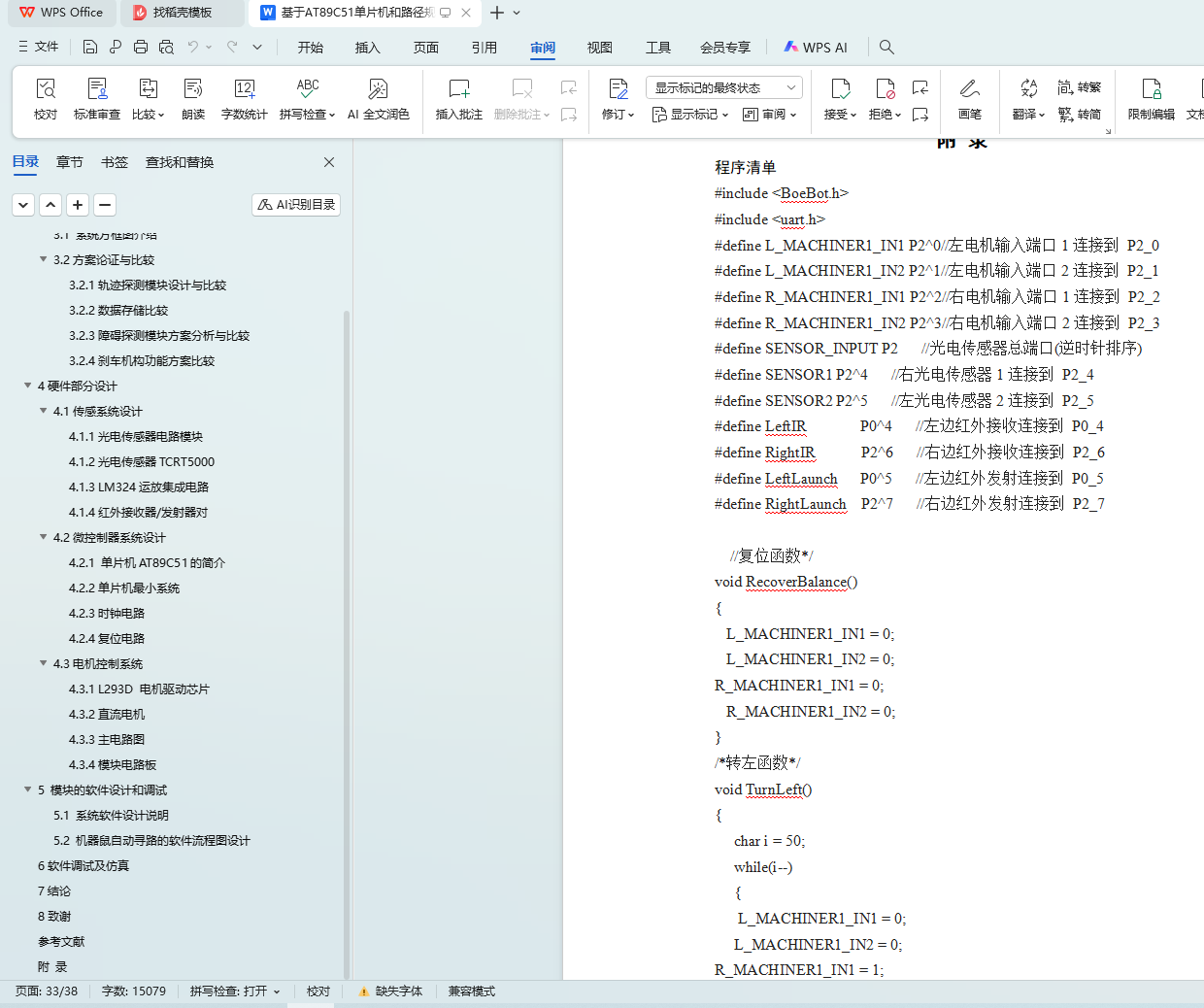
附 录