|
一、综述本课题国内外研究动态,说明选题的依据和意义
国内外研究动态:
随着中国科技的飞速发展和高新技术产品的出现,推动企业发展的生产模式发生了新的变革。传统的通过人工的体力劳动,已经难以满足现代企业的生产需要,目前大部分企业追求的是低劳动力的投入,从而获得高效的生产能力。基于目前国内外市场发展的趋势,工业机械手应运而生,机械手的出现对现代企业具有划时代的意义。[1]
近年来,国内在六自由度机械手领域取得了显著进展,主要集中在以下几个方面:新型结构设计:国内学者提出了多种机械手结构,例如基于并联机构的机械手[2],以提高机械手的灵活性、精度和负载能力。轻量化设计:采用高强度轻质材料、优化结构设计等方法,减轻机械手重量,提高其运动速度和效率。模块化设计:将机械手设计成模块化结构,便于组装、维护和升级,提高机械手的通用性和适应性[3]。智能化设计:将人工智能技术应用于机械手结构设计,例如利用机器学习算法优化机械手结构参数,提高机械手的智能化水平。
国外在六自由度机械手领域起步较早,技术相对成熟,主要集中在人机协作(国外学者研究人机协作机械手结构,例如采用力反馈控制、安全防护装置等,确保人机协作的安全性)和特种机械手(针对特殊应用场景,国外学者研究开发了多种特种机械手,例如空间机械手、水下机械手、医疗机械手等)。
选题依据:
随着工业4.0和智能制造理念的推动,市场对灵活、高效的自动化设备需求激增[4]。六自由度机械手因其出色的灵活性和多功能性,成为满足这些需求的重要工具。
六自由度机械手在制造业、医疗、服务等多个领域都有广泛的应用前景,研究其关键技术将对提升行业自动化与智能化水平具有重要意义。
选题意义
提升技术水平:通过对六自由度机械手的研究,推动机器人领域的技术进步,特别是在结构设计、控制算法[5]及应用技术方面的创新。
促进产业发展:六自由度机械手的成功应用将促进机器人产业的发展,提高整体生产效率,降低人力成本,对经济发展产生积极影响[6]。
改善生活质量:在医疗、服务等领域的应用将改善负担,提升人类生活质量和工作效率,使越来越多的人能够受益于智能技术的发展。
推动学科交叉:六自由度机械手研究促进机械工程、电子工程、计算机科学等多个学科的交叉融合,推动学术研究和教育的创新发展。
|
|
二、研究的基本内容,拟解决的主要问题:
基本内容:
2.1总体方案设计
结构类型选择:
采用串联式结构,由基座、肩部、肘部、腕部等部分组成。串联式结构具有结构简单、运动灵活、工作空间大等优点,适用于本设计目标。
关节配置:
采用6个旋转关节,分别为:
关节1: 基座旋转关节,实现机械手绕Z轴旋转。
关节2: 肩部俯仰关节,实现机械手绕Y轴旋转。
关节3: 肘部俯仰关节,实现机械手绕Y轴旋转。
关节4: 腕部旋转关节,实现机械手绕Z轴旋转。
关节5: 腕部俯仰关节,实现机械手绕Y轴旋转。
关节6: 腕部旋转关节,实现机械手绕Z轴旋转。
传动方式选择:
采用谐波减速器+伺服电机的传动方式。谐波减速器具有传动比大、精度高、体积小等优点,适用于高精度机械手。
材料选择:
机械手主体结构采用高强度铝合金,具有重量轻、强度高、耐腐蚀等优点。关键部件如轴承、齿轮等采用高强度钢,以提高机械手的负载能力和使用寿命。
2.2机械手感知与决策
传感器技术: 研究视觉传感器、力传感器、触觉传感器等不同传感器的应用,提高机械手的感知能力。
环境感知: 研究机械手如何感知和理解周围环境,为机械手的决策提供依据。
路径规划: 研究机械手如何规划运动路径,避免碰撞并高效完成任务。
任务规划: 研究机械手如何规划任务执行顺序,提高任务完成效率。
根据测试结果,对机械手的结构设计、控制参数等进行优化,以提高机械手的性能。
拟解决的主要问题:
(1)大工作空间与紧凑结构的矛盾:
大工作空间要求机械手具有较长的臂展,而紧凑结构则要求机械手具有较小的体积和重量。如何设计出既具有大工作空间又结构紧凑的机械手,是另一个需要解决的问题。
(2)高负载能力与轻量化的矛盾:
高负载能力要求机械手具有较高的强度和刚度,而轻量化则要求机械手采用轻质材料和优化结构设计。如何在保证高负载能力的同时实现轻量化,是机械手结构设计面临的挑战。
(3)成本控制与高性能的矛盾:
高性能机械手通常需要采用高精度零部件和先进的控制系统,这会导致成本上升。
|
|
三、研究步骤、方法及措施:
研究步骤:
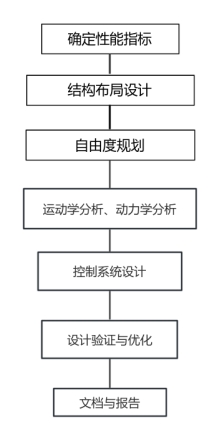
1. 确定性能指标:根据应用需求设定关键性能指标,包括负载能力、工作范围、精度、速度等。
2. 结构布局设计:构思机械手的基本结构,包括基座、臂架、关节和末端执行器的布局。
3. 自由度规划:确定六个自由度的配置,决定各个关节的类型(旋转关节还是线性关节)。4. 运动学分析、动力学分析:建立运动学模型,确定机械手的工作范围和可达空间。建立动力学模型,分析各个关节和结构在运动过程中所受的力和扭矩。
5. 控制系统设计:决定适用于机械手的控制算法(如PID、模糊控制等),结合硬件与软件,开发实时控制系统。
6. 设计验证与优化:通过实验或仿真验证设计的准确性和性能。根据验证结果,对设计进行调整和优化。
7. 文档与报告:详细记录设计过程、分析结果、测试数据等并撰写论文。
技术路线,见图:
技术路线图
|
|
四、参考文献
[1]郑淮棱,潘琦.浅析工业机械手的发展趋势及应用[J].科技风,2019,(20):183.DOI:10.19392/j.cnki.1671-7341.201920156.
[2]刘江南.四自由度机械手轨迹规划算法与应用研究[D].哈尔滨工业大学,2015.
[3]吴静如.一种气动机械手及运动设计[J].硅谷,2012,(02):69-70.
[4]杨波,裴旭辉,王栓义,等.关于轻量化机械手的发展前景分析[J].计算机产品与流通,2020,(08):254-255.
[5]郭军.一种改进的五自由度机械手控制算法研究[J].数字通信世界,2018,(08):220+122.
[6]任斌.人工智能背景下工业机器人发展动态[J].电子世界,2021,(09):8-9.DOI:10.19353/j.cnki.dzsj.2021.09.003.
|