毕业设计(论文)开题报告
|
班 级
|
过程装备与控制工程
|
姓 名
|
|
|
课题名称
|
芯片自动焊接机器人机械系统的设计
|
|
开题报告(包括选题意义、研究的基本内容与拟解决的主要问题、总体研究思路与可行性分析,预期研究成果、研究工作计划等内容,非艺术类不少于3000字)
目 录
1 选题的背景与意义
1.1国内外研究现状和发展趋势
1.2 芯片焊接机器人研究意义
2 研究的基本内容与拟解决的主要问题
2.1 基本内容
2.2 拟解决的主要问题
3 研究思路方案、可行性分析及预期研究成果
3.1研究思路方案
3.2可行性分析
3.3 预期研究成果
4 研究工作计划
参考文献
(开题报告全文附后)
成绩:
|
|
答 辩
意 见
|
(从选题、任务工作量、质量预期、可行性等几个方面)
答辩组长签名:
年 月 日
|
教
学
主
任
审
核
意
见
|
签名:
年 月 日
|
芯片自动焊接机器人机械系统的设计
目录
毕业设计(论文)开题报告
3.1研究思路方案
芯片自动焊接机器人机械系统的设计
1选题的背景与意义
1.1 国内外研究现状和发展趋势
1.1.1 工业机器人定义
1.1.2 工业机器人分类
1.1.3 国内外工业机器人研究趋势
1.1.4 国内外焊接机器人研究现状
1)国外焊接机器人研究现状
2)国内焊接机器人研究现状
1.1.5焊接机器人存在的主要问题
1.2 芯片焊接机器人研究意义
3.2 可行性分析
3.3 预期研究成果
参考文献
1选题的背景与意义
机器人技术是融合了电子技术、机械技术等多种新兴技术的一种高新技术。工业机器人先后经历了从第一代示教再现机器人、第二代离线编程机器人,到现在的第三代智能机器人三个过程[1]。焊接作为工业“裁缝”,是工业生产中非常重要的加工手段,焊接质量的好坏对产品质量起着决定性的影响,同时由于焊接烟尘、弧光、金属飞溅的存在,焊接的工作环境又非常恶劣。随着先进制造技术的发展,实现焊接产品制造的自动化、柔性化与智能化已经成为必然趋势,采用机器人焊接已经成为焊接技术自动化的主要标志[1]。
焊接机器人是一种高度自动化的焊接设备。采用机器人代替手工焊接作业是焊接制造业的发展趋势,是提高焊接质量、降低本钱、改善工作环境的重要手段。机器人焊接作为现代制造技术发展的重要标志已被国内很多工厂所接受,并且越来越多的企业首选焊接机器人作为技术改造的方案。
本课题的主要目的是采用对芯片焊接工业机器人工作原理,设计出一套多自由度工业机器人机械系统。
1.1 国内外研究现状和发展趋势
1.1.1 工业机器人定义
所谓工业机器人,就是面向工业领域的多关节机械手或多自由度机器人,通常是指一种能模拟人的手、臂的部分动作,按照预订的程序、轨迹及其他要求,实现抓取、搬运工件或操纵工具的自动化装置[2]。
1.1.2 工业机器人分类
机器人的机械配置形式多种多样,典型机器人的机构运动特征是用其坐标特性来描述的。按机构运动特征,机器人通常可分为直角坐标机器人、柱面坐标机器人、球面坐标机器人和关节型机器人等类型[3]。
1)直角坐标机器人。直角坐标机器人具有空间上相互垂直的两根或三根直线移动轴(见图1),通过直角坐标方向的3个独立自由度确定其手部的空间位置,其动作空间为一长方体。直角坐标机器人结构简单,定位精度高,空间轨迹易于求解;但其动作范围相对较小,设备的空间因数较低,实现相同的动作空间要求时,机体本身的体积较大。主要用于印刷电路基板的元件插入、紧固螺丝等作业。
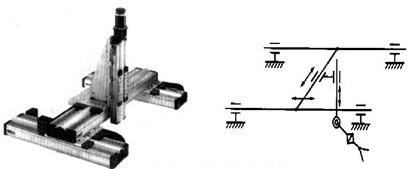
图1 直角坐标机器人